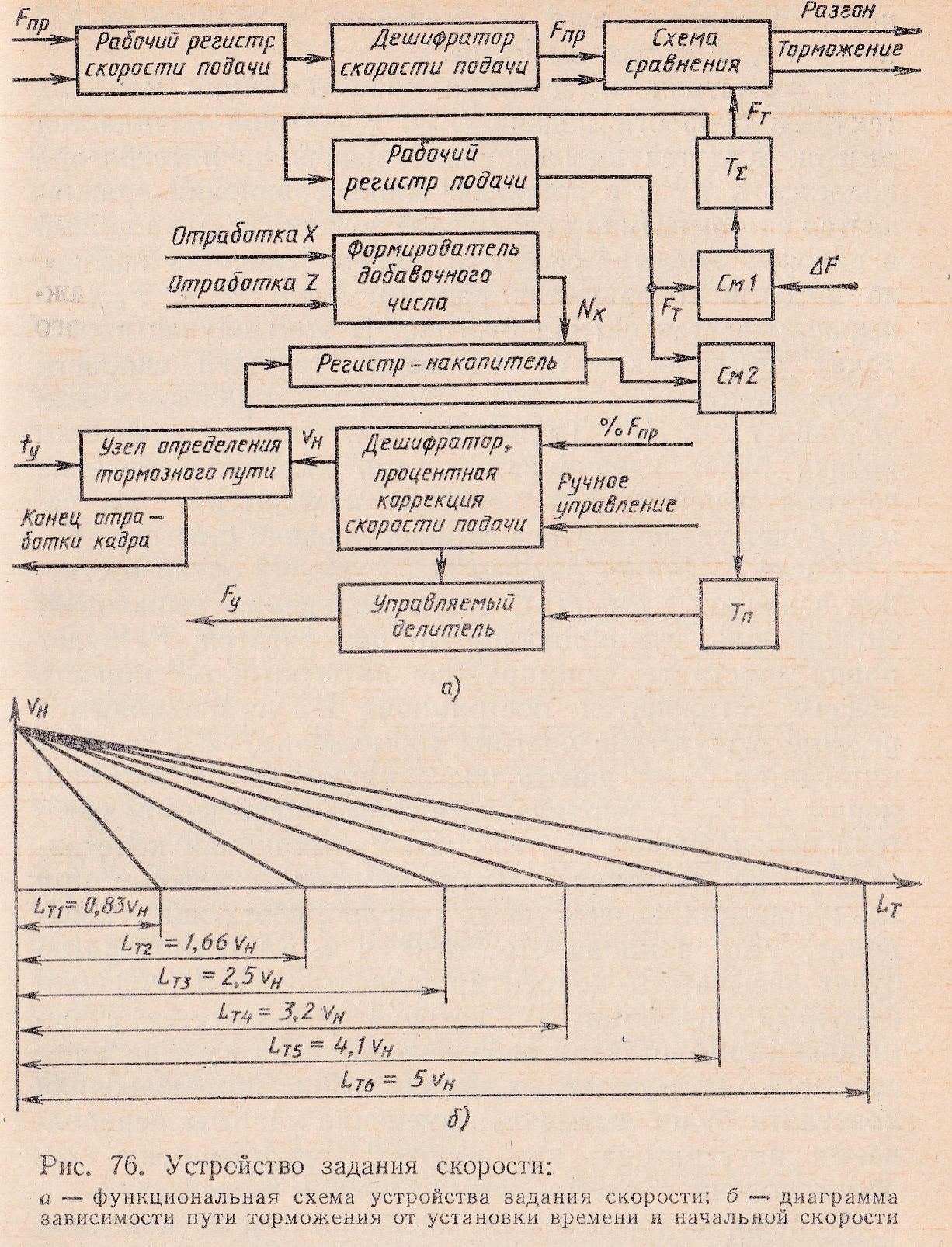
Устройство задания скорости (УЗС) (рис. 76, а) состоит из рабочего регистра скорости, хранящего код скорости подачи, назначенной в УП, или кода скорости, до которой осуществляется разгон или торможение. Рабочий регистр подачи хранит код скорости подачи, заданный в программе, или вычисленный код скорости, т. е. ее текущее значение при разгоне-торможении (FТ + ∆F, где FТ — текущее значение скорости, ∆F — приращение). Регистр-накопитель совместно с операционными сумматорами (См1, См2) и рабочим регистром подачи является вычислительным устройством для вычисления выходной частоты (управляющее слово FY) согласно значению суммируемой константы, которая является кодом скорости подачи (FПР) или текущей скоростью подачи, вычисляемой в режиме разгона—торможения (FТ ± ∆F).
 Дешифратор «процентная коррекция скорости подачи» блок сравнения и дешифраторы текущего кода скорости подачи (TΣ) обеспечивают сравнение запрограммированной скорости подачи с текущим значением вычисленной скорости подачи (действующая), поступающим из дешифратора кода текущей скорости подачи, чтобы обеспечить прекращение разгона или торможения в тот момент, когда текущая скорость подачи достигает значения, равного заданной в УП скорости перемещения. Узел определения длины тормозного пути совместно с дешифратором «%» коррекции скорости подачи определяет длину пути торможения или разгона согласно временным установкам (временные установки (У1—У4) путем перестановки перемычек выбирают в процессе наладки с учетом динамики узлов станка). Кроме того, дешифратор «Процентная коррекция скорости подачи» управляет делителем выходной части при изменении скорости подачи оператором с пульта.
Дешифратор «процентная коррекция скорости подачи» блок сравнения и дешифраторы текущего кода скорости подачи (TΣ) обеспечивают сравнение запрограммированной скорости подачи с текущим значением вычисленной скорости подачи (действующая), поступающим из дешифратора кода текущей скорости подачи, чтобы обеспечить прекращение разгона или торможения в тот момент, когда текущая скорость подачи достигает значения, равного заданной в УП скорости перемещения. Узел определения длины тормозного пути совместно с дешифратором «%» коррекции скорости подачи определяет длину пути торможения или разгона согласно временным установкам (временные установки (У1—У4) путем перестановки перемычек выбирают в процессе наладки с учетом динамики узлов станка). Кроме того, дешифратор «Процентная коррекция скорости подачи» управляет делителем выходной части при изменении скорости подачи оператором с пульта.
При работе УЗС в режиме разгона в рабочий регистр скорости подачи засылается код скорости подачи, который соответствует ее значению, заданному в УП по адресу F в данном кадре.
В регистрах интегратора хранятся нули или код текущей скорости подачи (FТ), с которой начинается разгон. Код текущей скорости подачи из интегратора подается в Т2 и с помощью блока сравнения сравнивается с программной скоростью подачи (FПР), заданной в рабочем регистре скорости подачи (скорость подачи, до которой совершается разгон). Если FТ <FПР, то вырабатывается сигнал разгона. В этом случае происходит циклическое суммирование текущей скорости с приращением (FТ + ∆F) с проверкой в каждом цикле условия FТ <FПР. Таким образом, текущая константа подачи будет увеличиваться, что вызовет изменение частоты переполнения регистра накопителя, тем самым будет увеличиваться скорость подачи (разгон).
Когда FТ станет равным FПР (рабочий орган достигнет заданной скорости), схема сравнения выработает сигнал ноль, суммирование ∆F прекратится, FТ будет равна константе, формируемая интегратором скорость подачи установится постоянной. В установившемся режиме (отсутствие разгона торможения) FПР = const интегратор будет давать постоянную частоту переполнения FУ (FУ — управляющее слово) посредством триггера переполнения ТП, так как суммируемая константа FПР не меняется. Однако в данном режиме при возмущающих воздействиях (число работающих координат, угол наклона отработки и т. д.) в интегратор будет засылаться корректирующая константа (NК) (добавочный коэффициент), которая формируется с помощью формирователя добавочного числа на основании сведений о возмущающих воздействиях. Эта добавочная константа будет вызывать изменение частоты переполнения интегратора, что вызовет корректировку скорости подачи с учетом возмущающих воздействий.
В режиме торможения засланное число конечной скорости торможения сравнивается с текущей подачей FТ (действующая скорость подачи). Если FТ>> FПР, то вырабатывается сигнал торможения, который выполняет вычитание из FТ приращения ∆F в интеграторе с последующей проверкой условия FТ = FПР. При достижении FТ = FПР вырабатывается сигнал «0» блоком сравнения, что прекращает вычитание ∆F, т. е. торможение. Время торможения в УЧПУ задается фиксированным посредством установок, которые учитывают время торможения рабочего органа с учетом динамики узлов. Следовательно, временные установки могут меняться во время отладки СЧПУ с выбором оптимального пути торможения. Оптимальный путь разгона (торможения) выбирается, исходя из следующих соображений (выбранные установки времени в устройстве tY1= 0,5С — tYB = ЗС) LT = (υH — υK) X tY/2 мм, где υH и υK — соответственно начальная и конечная скорость движения.
Если считать, что υK = 0,05υH, то значением υK можно пренебречь. Кроме того, в уравнении путь торможения (LT) можно выразить через дискреты точности отработки (цена дискреты 0,05), а скорость подачи — в мм/мин. Получим следующее уравнение: 0,05LT = υHtY/60*2.
Разрешив это уравнение относительно LT, получим LT = υHtY/0,6, где LT — в дискретах.
Таким образом, путь торможения рабочего органа зависит от начальной (конечной) скорости подачи и от временной установки, которая выбирается при наладке. На рис. 76, б представлена зависимость пути торможения, выраженного в дискретах, от установки времени торможения и начальной скорости.
Для обеспечения постоянства контурной скорости в УЗС используется корректировка суммируемой константы путем выработки добавочного числа NK, которое суммируется с основной константой подачи. NK вырабатывается формирователем добавочного числа на основании полученных сведений о характере движения (число работающих координат, соотношение перемещения по координатам и т. д.).