Структурные схемы электроприводов подач различаются видами преобразовательных и управляющих устройств (рис. 17).
Ступенчатое регулирование скорости стола С осуществляет редукторный электропривод (рис. 17, а), который содержит нерегулируемый асинхронный электродвигатель М переменного тока, связанный с ходовым винтом через редуктор с электромагнитными муфтами ЭМ1 и ЭМ2. Привод имеет программное управление от системы числового программного управления (СЧПУ), получающей сигналы от преобразователя пути (датчика обратной связи ДОС) через канал обратной связи ОС. В начале перемещения от СЧПУ включается электромагнитная муфта ЭМ1. Электродвигатель М приводит во вращение ходовой винт, и стол станка С начинает поступательно перемещаться; датчик обратной связи при повороте ходового винта дает соответствующее число импульсов. При подходе к точке останова СЧПУ подает сигнал на отключение электромагнитной муфты ЭМ1 и включение электромагнитной муфты ЭМ2, при этом через редуктор осуществляется медленное перемещение стола С и полное торможение электропривода. Этот электропривод применяют только в позиционных и прямоугольных системах числового программного управления.
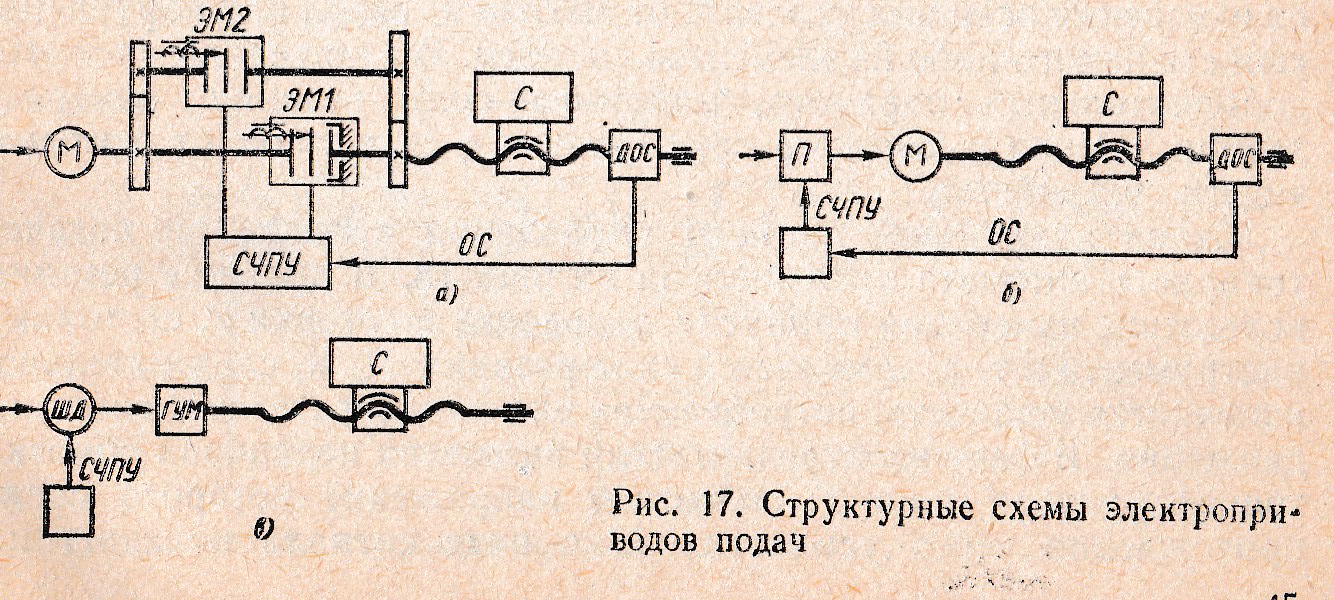
Бесступенчатое регулирование скорости стола С осуществляется в регулируемом электроприводе (рис. 17, б). Электропривод содержит электродвигатель М постоянного тока с широким диапазоном бесступенчатого регулирования, который питается от мощного статического преобразователя П (например, тиристорного) и имеет программное управление от СЧПУ, получающей сигналы от преобразователя пути ДОС через канал обратной связи ОС. Электропривод применяют также только в позиционных и прямоугольных системах ЧПУ. Рассмотренные схемы электроприводов используют и в контурных системах ЧПУ, но при этом применяют следящее управление электроприводом. Схемы электроприводов, имеющие преобразователи перемещений ДОС, называют замкнутыми.
Шаговый электропривод (рис. 17, в) осуществляет ступенчатое (дискретное) перемещение стола С. Он содержит шаговый электродвигатель ШД малой мощности, гидроусилитель момента ГУМ, кинематическую пару винт—гайка, связанную со столом станка С. Шаговый электродвигатель при подаче от СЧПУ каждого командного импульса напряжения поворачивает свой вал на небольшой угол. Вследствие малой мощности шагового электродвигателя ШД его момент недостаточен для перемещения стола С. Поэтому он работает совместно с гидроусилителем момента ГУМ, который создан на основе аксиально-поршневого гидромотора. У этого гидромотора золотниковый распределитель соединен с валом электродвигателя. Таким образом, величина перемещения стола С определяется числом импульсов, поступивших от СЧПУ. Если электродвигатель отрабатывает все поступившие импульсы, то преобразователь перемещения не нужен. Такую систему называют разомкнутой.