Электрический привод — электромеханическая система, состоящая из преобразовательного, электродвигательного и управляющего устройств. Электропривод связан с источником энергии и является потребителем энергии. Цепь электропривода начинается от источника энергии и связана с рабочим органом станка. Электропривод входит в состав принципиальных схем станков.

Электропривод различается по видам движения исполнительных органов энергетического машинного устройства, по видам передаточных устройств, по роду тока электродвигателя, по виду преобразовательных устройств, по степени управляемости, по уровням автоматизации управления, по видам усилительных элементов в управляющем устройстве. В станках с программным управлением используется преимущественно многодвигательный электропривод, который позволяет упростить кинематические цепи, уменьшить число механических передач, улучшить эстетическое исполнение станков.
Источником движения в станках обычно является электродвигатель. Электропривод главного движения должен обеспечить необходимые скорости движения инструмента или заготовок, передать требуемые силы для обработки резанием.
Электропривод должен сохранять примерное постоянство скорости движения рабочего органа при изменениях нагрузки, вызванных колебаниями припуска на обработку. Он должен обеспечить требуемое качество переходных процессов при изменении нагрузки (возмущающее воздействие) и при изменении задания (управляющее воздействие).
Кинематическая цепь электропривода главного движения изображена на рис. 5. В процессе работы станка электродвигатель М развивает движущий момент МД. Под совместным действием сил резания и сил трения в движущихся частях электропривода станка возникает момент сил сопротивления МС. При этом может происходить изменение угловой скорости электродвигателя со; тогда дополнительно возникает динамический момент сил инерции МJ.
Движения в электроприводе связаны уравнением:
МД = МС + МJ,
где МС — момент сил сопротивления, Н*м; МJ, — момент инерции системы, приведенный к валу электродвигателя, кг*м2,
МJ = J*(dω/dt),
где dω/dt — угловая скорость, рад/с.
Если известны моменты инерции элементов движущихся частей электропривода (ротора электродвигателя, валов и зубчатых колес), вращающихся со скоростями ω, ω1, ω2, тогда момент инерции, приведенный к валу электродвигателя, можно определить из уравнения:
![]()
где υ – линейная скорость, м/с.
Если нет элементов, движущихся поступательно со скоростью V (например, в цепи шпинделя), то выражение упрощается. Направление динамического момента зависит от знака dω/dt. Момент двигателя МД зависит от угловой скорости ω = ƒ (МД).
Когда МД = МС и (dω/dt) = 0, имеем равномерное движение. При МД ≠ МС и (dω/dt) ≠ 0, имеем переходной процесс электродвигателя. Пуск и торможение, а также разгон электропривода станка являются переходными процессами: МJ > 0 и (dω/dt)> 0 — разгон, если МJ < 0 и (dω/dt)< 0 — замедление.
Важнейшей характеристикой регулируемого электропривода является диапазон регулирования Д:
Д = nMAX/nMIN,
где nMAX, nMIN — частоты вращения рабочего органа, об/мин.
В электроприводах вращательного движения диапазон регулирования может доходить до 100. Он осуществляется от асинхронного электродвигателя с короткозамкнутым ротором через многоступенчатую коробку передач (скоростей) или от регулируемого электродвигателя постоянного тока с диапазонной коробкой передач (на две, три или четыре ступени).
Наиболее простым, дешевым, надежным, экономичным и удобным в эксплуатации является асинхронный электродвигатель с короткозамкнутым ротором.
Электродвигатель обеспечивает примерно постоянную частоту вращения при изменении нагрузки в широких пределах и поддерживает заданный режим резания. Поэтому асинхронные короткозамкнутые электродвигатели являются в станкостроении самыми распространенными. Однако в приводе главного движения металлорежущих станков широкое распространение получает регулируемый электропривод с двигателем постоянного тока и тиристорным управлением. Преимуществом этого электропривода являются возможность изменять частоту вращения бесступенчато, а также управлять характеристиками пусковых и тормозных процессов.
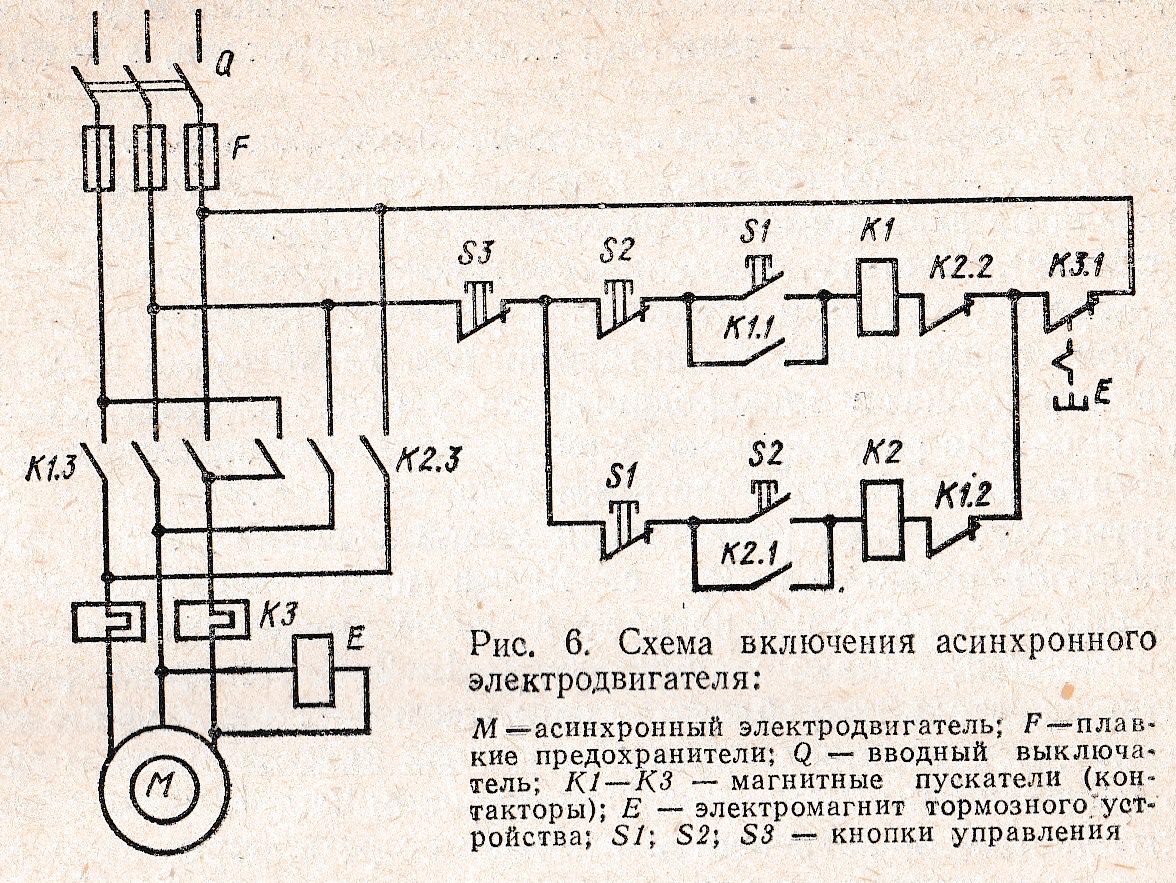
Все операции по управлению работой станка (пуск, регулирование частоты вращения, торможение) выполняются с помощью пускорегулирующей аппаратуры, входящей в состав систем электроприводов. Типовая электрическая принципиальная схема включения трехфазного асинхронного электродвигателя с релейно-контакторным управлением представлена на рис. 6. Электрическая схема предусматривает включение электродвигателя в обе стороны, защиту от перегрузки и торможение при включении электромагнита тормозного устройства.
Вращающий момент электродвигателя пропорционален произведению силы тока на магнитный поток, а величина тока электродвигателя определяет сечение его обмотки. Сечение магнитопровода определяется величиной магнитного потока. Габаритные размеры электродвигателя зависят от его вращающего момента.
Номинальную мощность (Вт) на валу электродвигателя определяют по формуле:
PНОМ = МНОМωНОМ,
где МНОМ – номинальный момент, Н*м; ωНОМ = πnНОМ/30 – угловая скорость ротора, рад/с; nНОМ – частота вращения ротора, об/мин,
PНОМ = РMAX/ƞСТ
где РMAX — максимальная мощность резания; ƞСТ — коэффициент полезного действия (КПД) электропривода станка (ƞСТ = 0,7÷0,8).
Мощность электродвигателя возрастает с увеличением частоты вращения. Частота вращения асинхронного электродвигателя зависит от скорости вращения магнитного поля:
n = (60ƒ/P)*(1-s) об/мин,
где ƒ — частота тока питающей сети, Гц; р — числе пар полюсов в обмотке статора; s — величина скольжения ротора, s = (0,02÷0,05).
В станкостроении обычно применяют быстроходные электродвигатели (nНОМ = 1500 об/мин), а также многоскоростные электродвигатели на две, три и четыре скорости (например, 3000—1500— 750 об/мин). Частоту вращения снижают посредством механических передач, при этом ступенчатое регулирование осуществляют по закону геометрической прогрессии путем изменения числа пар полюсов электродвигателя у одной обмотки статора.
Применение регулируемых электродвигателей позволило резко упростить механическую часть привода.
Время пуска электродвигателя малой мощности без нагрузки (вхолостую) равно 0,2—0,3 с. Время пуска электродвигателя с увеличением нагрузки на валу и массы приводного механизма увеличивается, однако не превышает 1—2 с. Во время разгона электродвигатель потребляет из сети ток в 6—7 раз больше номинального, поэтому число пусков в час для каждой системы двигатель — механизм ограничено. При слишком частом пуске обмотка электродвигателя нагревается и может сгореть. Предельно допустимая температура корпуса электродвигателя 95°С. Наиболее опасным для перегрева режимом работы является толчковый режим, когда электродвигатель включается. Кратковременная работа электродвигателя с гарантированными паузами отключения, обеспечивающими его охлаждение, позволяет допускать перегрузку электродвигателя до 30—50 %.
Вал асинхронного электродвигателя трехфазного тока может вращаться в любую сторону. Изменение направления вращения вала достигается взаимным изменением присоединения к статору любых двух из трех питающих проводов. Это приводит к изменению направления вращения магнитного поля статора, а, следовательно, и ротора. Резкие изменения частоты вращения асинхронных электродвигателей (особенно при реверсе противовключением) вызывают пиковые моменты, превышающие величины номинального момента в 4—12 раз. Действие этих моментов при частом реверсировании электродвигателя может привести к выходу из строя двигателя или приводимого им механизма.
Подшипники качения электродвигателей густо смазываются смазочным материалом, который заменяют не реже 2 раз в год. Максимально допустимая температура нагрева подшипников качения 95°С.
Вспомогательные электроприводы обычно выполняются на основе асинхронных электродвигателей с короткозамкнутым ротором и являются нерегулируемыми. Вспомогательные электроприводы работают, как правило, в кратковременном режиме.
Специальные электродвигатели питаются от источника тока повышенной частоты в несколько сотен и тысяч герц и получают частоту вращения от десятков до сотен тысяч об/мин. В качестве примера можно привести специальные высокооборотные электродвигатели с шлифовальным кругом, закрепленным на его валу. Такие механизмы называются электрошпинделями. Электрошпиндели используют в приводах станков для сверления печатных плат, а также при шлифовании отверстий малого диаметра. Для получения требуемой скорости резания необходима высокая частота вращения шпинделя. Например, при шлифовании отверстия кругом диаметром 3 мм необходима скорость 20 м/с (частота вращения шпинделя должна быть равна 200 000 об/мин). При высокой частоте вращения шпинделя силу прижима круга можно уменьшить. При этом засаливание круга и изгиб оправки уменьшаются, а шероховатость поверхности и точность обработки улучшаются.
В промышленности используют различные модели специальных скоростных асинхронных электродвигателей — электрошпиндели с частотой вращения 15 000—150 000 об/мин и более. Электрошпиндель представляет собой шлифовальный шпиндель на подшипниках качения со встроенным короткозамкнутым электродвигателем повышенной частоты (рис. 7).
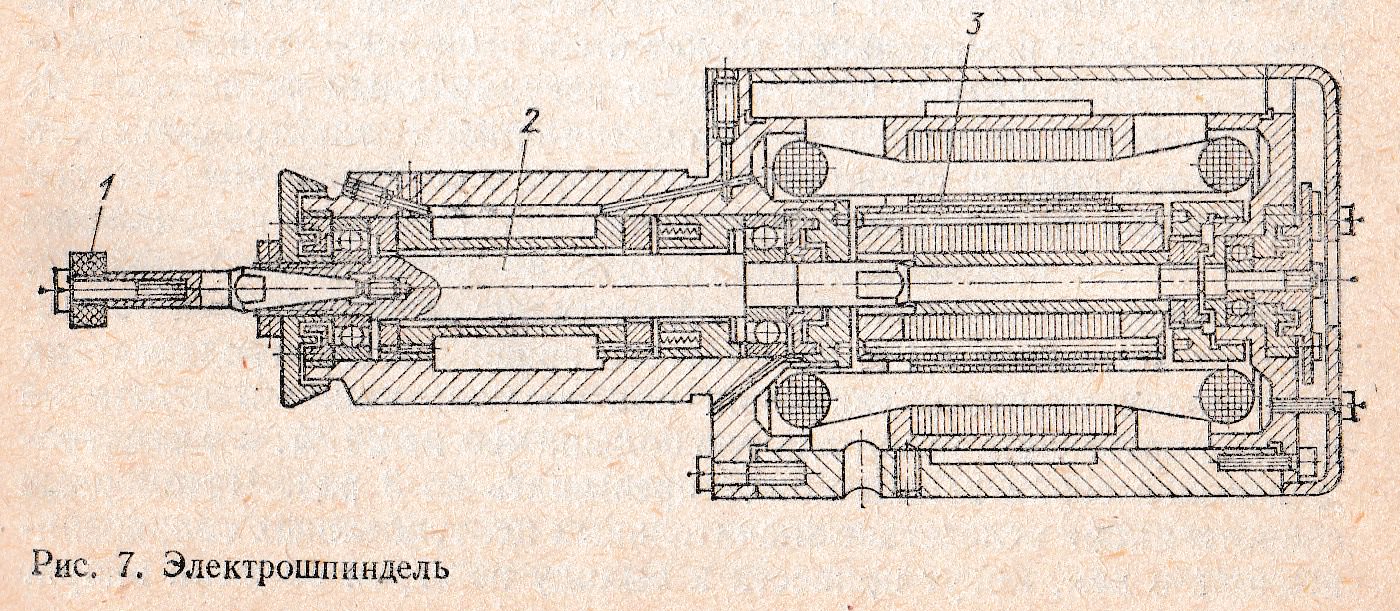
Ротор электродвигателя и шпиндель 2 помещены между двумя опорами. На конце шпинделя закреплен шлифовальный круг 1. Статор и ротор электродвигателя электрошпинделя собраны из листовой электротехнической стали. Для уменьшения вихревых токов листы стали тщательно изолируют между собой, а на роторе размещается обычная короткозамкнутая обмотка 3. Диаметр ротора стремятся, но возможности уменьшить. Применяют шариковые подшипники повышенной точности, которые работают с предварительным натягом, создаваемым посредством тарированных пружин. Такие подшипники применяют для частот вращения не более 100 000 об/мин. В промышленности значительное распространение получили электрошпиндели на аэростатических, подшипниках. При синхронных частотах вращения электрошпинделей 12 000 и 120 000 об/мин частота тока должна быть соответственно 200 и 2000 Гц. Для питания электрошпинделей используют статические преобразователи частоты (например, типа ПЧС), выполненные на тиристорах, или преобразователи частоты электромашинные с регулированием частоты (типа ПВСП).
Электрические схемы управления регулируемыми электродвигателями постоянного тока сложнее схем управления нерегулируемыми асинхронными электродвигателями.
Отличительной особенностью электродвигателей постоянного тока является их способность плавно изменять частоту вращения при изменении величины тока возбуждения магнитного поля или величины напряжения питания якоря. Применяя различные схемы управления электродвигателями постоянного тока, можно обеспечить нужную зависимость скорости вращения от величины нагрузки вала электродвигателя.
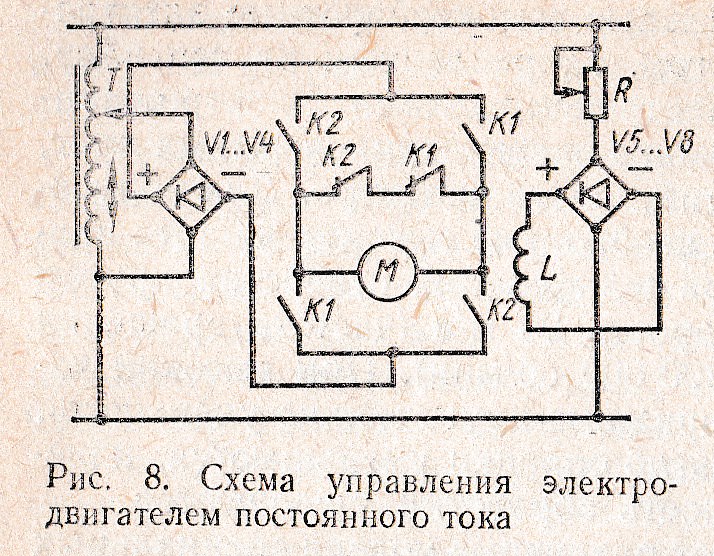
Схема управления регулируемым реверсивным электродвигателем постоянного тока с релейно-контакторным управлением показана на рис. 8. Питание электродвигателя постоянного тока осуществляется от двух выпрямителей V1—V4; V5—V8. Выпрямитель V1—V4 выпрямляет ток в цепи якоря электродвигателя М, а V5—V8 — в цепи обмотки возбуждения L электродвигателя. Изменение частоты вращения якоря электродвигателя достигается изменением расположения регулятора, например, автотрансформатора Т вверх-вниз. Перемещение регулятора (движка токосъемника) вверх увеличивает напряжение на якоре электродвигателя М, что приводит к увеличению частоты вращения якоря. Такая схема позволяет изменять (уменьшать) частоту вращения в 80 раз. Применяется она при условии постоянной нагрузки на валу электродвигателя, например, для механизмов подачи шлифовальных станков. Регулирование скорости выше номинальной может быть выполнено также уменьшением тока в обмотке возбуждения регулируемым резистором R.
Изменение направления вращения якоря электродвигателя достигается сменой полярности на якоре с помощью контакторов К1 и К2 или специальных переключателей. Изменять направление можно также изменением полярности на обмотке возбуждения. Торможение электродвигателя осуществляется замыканием размыкающих контактов K1 и К2. Частота вращения электродвигателя в приводах главного движения при регулировании в шунте не должна превышать номинальную больше чем на 20 %, а у электродвигателей серии 2ПфШ может превышать до 3 раз. Чрезмерные обороты якоря вследствие значительных центробежных сил, возникающих в нем, могут привести к выходу из строя обмотки якоря.
Допустимый нагрев, условия и время пуска электродвигателей постоянного тока аналогичны приведенным выше для асинхронного электродвигателя.