В командной системе автоматического управления управление осуществляется с помощью командоаппаратов, в последнее время это программируемые микроконтроллеры (программируемые командоаппараты).
В связи с развитием микроэлектронной техники в последние годы получают распространение программируемые схемы электроавтоматики (устройства с программной логикой). Релейно-контактные схемы электроавтоматических устройств станков и других технологических объектов интенсивно вытесняются микроэлектронными управляющими устройствами, построенными на интегральных схемах, на выходах которых имеются силовые ключи, непосредственно управляющие исполнительными органами.
Ввиду большого многообразия решаемых задач все программируемые микроконтроллеры по способу организации алгоритма работы, по гибкости программы можно разделить на три класса:
- микропрограммные управляющие устройства с жесткой логикой (матричные), т. е. программируемые микроконтроллеры, которые построены по принципу жесткого программного автомата;
- программируемые командоаппараты (ПК), т. е. командоаппараты, где программа строится на базе репрограммируемого (перепрограммируемого) запоминающего устройства (РПЗУ, ППЗУ) или оперативного запоминающего устройства (ОЗУ), программа алгоритма действия может записываться в процессе проблемной ориентации на конкретный объект в производственных условиях с занесением программы с пульта программирования;
- программируемые командоаппараты, построенные на базе управляющих ЭВМ.
По своему назначению программируемые микроконтроллеры можно разделить на три разновидности:
- микроконтроллеры, ориентированные на реализацию алгоритмов логического типа и предназначенные для замены различных релейно-контактных и логических схем электроавтоматики и всевозможных командоаппаратов. Такие микроконтроллеры называют программируемыми логическими микроконтроллерами (ПЛМК);
- микроконтроллеры, ориентированные на реализацию автоматического регулирования аналоговых и дискретно-аналоговых технологических процессов. Они предназначены для замены различных аналоговых и цифровых автоматических регуляторов, построенных на релейных и других электронных схемах. Такие микроконтроллеры называют программируемыми регулирующими микроконтроллерами (ПРМК);
- микроконтроллеры, ориентированные на реализацию специальных алгоритмов управления (обмен информацией, управление периферийными устройствами и т. д.).
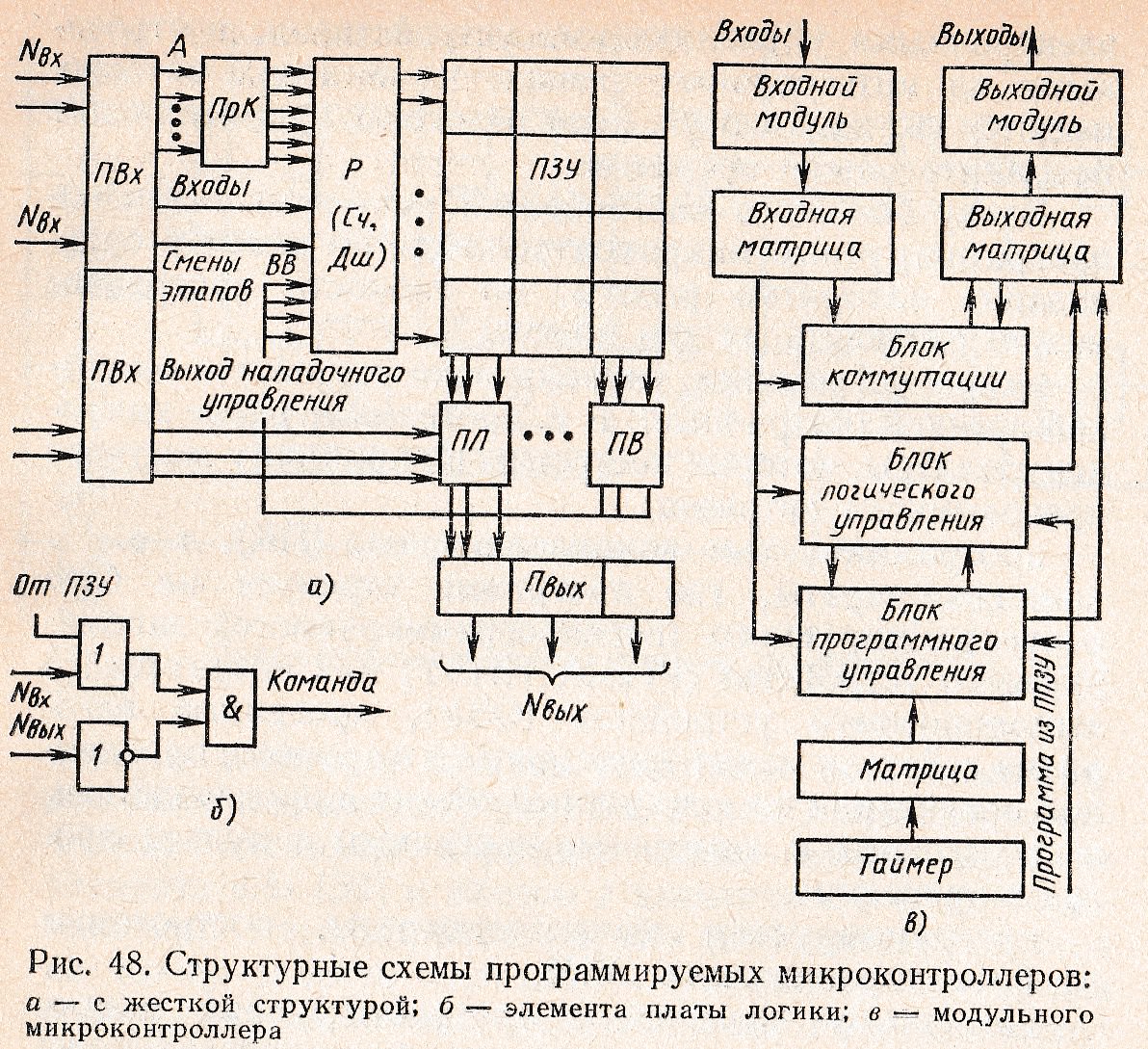 На рис. 48, а дана структурная схема типового программируемого микроконтроллера с жесткой структурой, который включает в себя; платы памяти (ПЗУ), выполненные в виде диодных матриц (емкость каждой платы зависит от объема реализуемых команд с форматом 50×32 … 256×256); распределитель (Р) в виде счетчика (Сч) с дешифратором (Дш); одну-две входные платы (ПВх), имеющие 32 входа и одну — три выходные платы ПВЫХ (16 выходов), обеспечивающие гальваническую развязку входных и выходных цепей; одну — две платы логики (ПЛ), а также платы временных задержек (ПВ) с интервалами задержки по времени 6—1000 с; преобразователь кодов (ПрК).
На рис. 48, а дана структурная схема типового программируемого микроконтроллера с жесткой структурой, который включает в себя; платы памяти (ПЗУ), выполненные в виде диодных матриц (емкость каждой платы зависит от объема реализуемых команд с форматом 50×32 … 256×256); распределитель (Р) в виде счетчика (Сч) с дешифратором (Дш); одну-две входные платы (ПВх), имеющие 32 входа и одну — три выходные платы ПВЫХ (16 выходов), обеспечивающие гальваническую развязку входных и выходных цепей; одну — две платы логики (ПЛ), а также платы временных задержек (ПВ) с интервалами задержки по времени 6—1000 с; преобразователь кодов (ПрК).
В диодную матрицу постоянного запоминающего устройства (ПЗУ) могут входить от одной до нескольких плат, т. е. емкость ПЗУ может изменяться. Горизонтальные шины матрицы соответствуют этапам цикла (такты работы схемы управления), а вертикальные шины — выходным командам.
При работе микроконтроллера распределитель последовательно включает горизонтальные шины ПЗУ. При включении любой из них на входы ПЗУ поступают команды, а с выходов тех вертикальных шин, к которым подключены диоды, поступают сигналы выхода (необходимое соединение диодов обеспечивается при программировании матрицы). Переключение распределителя на следующий этап цикла происходит в том случае, когда на его вход подается сигнал об окончании текущего этапа действий. Этот сигнал поступает на вход микроконтроллера от путевого выключателя или другого какого-либо аппарата (указание с пульта, переключение режима, сигнал блокировки, указание на прерывание и т. д.). Такое переключение может происходить в функции времени по сигналу от платы временных задержек. Элемент платы логики может иметь три входа (рис. 48, б), что обеспечивает подачу команды при выполнении какого-то условия, определяющего состояние объекта управления или пульта управления (подача команды с пульта NВХ, разрешающий сигнал блокировок, ответ об исполнении команды NВЫХ и т. д.). Программируемый микроконтроллер может коммутировать цепи силой тока от 0,2—0,3 А и напряжением 24—ИОВ. Для усиления выходных сигналов используют выходные усилители. Таким образом, программируемые микроконтроллеры совместно с датчиками пути и положения представляют собой комбинированную командно-путевую систему управления.
За последнее время программируемые микроконтроллеры (ПМ) строят по модульному принципу. Для них формирование сигналов управления по длительности и частоте следования определяется информацией, характеризующей состояние и технологические режимы объектов управления. Исполнение модулей микроконтроллера — микроэлектронное.
Структурная схема микроконтроллера, построенная по модульному принципу, дана на рис. 48, в. В микроконтроллер входят: входной модуль, который обеспечивает нормализацию сигналов и согласование их; входная матрица, с помощью которой сигналы подаются и распределяются в блоки логического и программного управления, где согласно программному управлению сигналы проходят логическую обработку и распределяются по адресам и времени, т. е. сигналы преобразуются в соответствии с заданным логическим алгоритмом. Блоки программного и логического управления, реализуя Булевские функции, формируют различные временные команды и их последовательность.
Требуемые временные интервалы формируются путем подсчета тактовых импульсов, поступающих в программный блок из таймера, и распределяются с помощью матрицы по соответствующим входам программного блока. Сформированные сигналы в блоках логического и программного управления через выходную матрицу, распределяясь, подаются на выходной модуль в виде управляющих сигналов.
Программируемые командоаппараты с программируемой или репрограммируемой памятью имеют ППЗУ или РПЗУ, в которое с помощью специальных программаторов заносят программу микроконтроллера. Считываемая из памяти программа обрабатывается в логическом микропроцессоре, что обеспечивает выдачу соответствующего алгоритма управляющих сигналов.
Запись управляющей программы в ППЗУ или РПЗУ осуществляется формированием адресов записи (переадресация с заданным шагом) и записывающих импульсов (запись кодов команд) с контролем вводимой информации на индикаторе. Программаторы для программирования ППЗУ классифицируют по следующим признакам: степени универсальности, производительности, числу одновременно программируемых БИС, способу управления программированием. По последнему признаку программаторы делят на автоматические (специальное программное обеспечение), полуавтоматические с ручным программированием.
 Простейший программатор с ручным программированием содержит: тумблеры или клавиатуру для набора адреса и данных, формирователь адресного кода (сигналы переадресации) и кода данных; индикатор контроля вводимой информации (адрес, код и номер вводимой ячейки). Программатор может работать в диалоговом режиме (режим взаимодействия пользователя с вычислительными устройствами), в режиме ввода и просмотра УП. В полуавтоматических программаторах ввод информации производится также вручную, однако после установки начального адреса программы последующая переадресация происходит автоматически.
Простейший программатор с ручным программированием содержит: тумблеры или клавиатуру для набора адреса и данных, формирователь адресного кода (сигналы переадресации) и кода данных; индикатор контроля вводимой информации (адрес, код и номер вводимой ячейки). Программатор может работать в диалоговом режиме (режим взаимодействия пользователя с вычислительными устройствами), в режиме ввода и просмотра УП. В полуавтоматических программаторах ввод информации производится также вручную, однако после установки начального адреса программы последующая переадресация происходит автоматически.
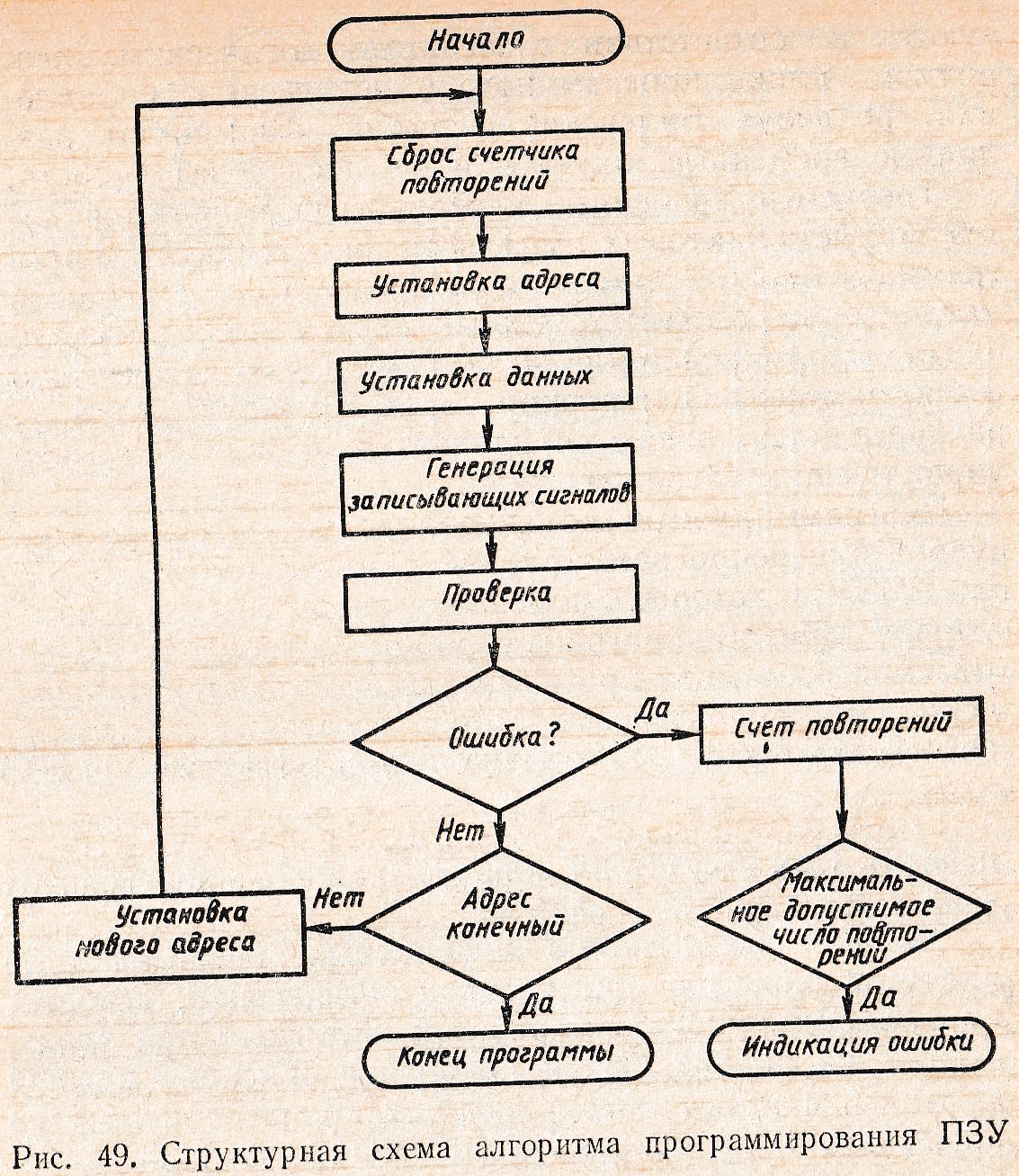
На рис. 49 представлена структурная схема алгоритма программирования. В начале программирования выполняется сброс счетчика повторений и установка начального адреса. Производится установка на клавиатуре кода или тумблерах вводимых данных, а затем осуществляется генерация записывающих сигналов, как правило, с помощью кнопки ввод. После записи происходит проверка введенной информации. Иногда необходимо повторить ввод с задержкой переадресации, если запись не произошла. При обнаружении ошибки можно данный фрагмент повторить многократно с редакцией н просмотром. При записи идет проверка конечного адреса, т. е. сравнение текущего адреса с конечным. При отсутствии конечного адреса производится ввод нового адреса и запись.
Важной особенностью современных программаторов является развитое программное обеспечение, которое, по существу, управляет работой оператора при вводе, причем на экране дается подробное описание каждой команды, а также может даваться полное руководство (инструкция) по использованию программатора. Сообщения оператору выдаются в символах, удобных для восприятия.
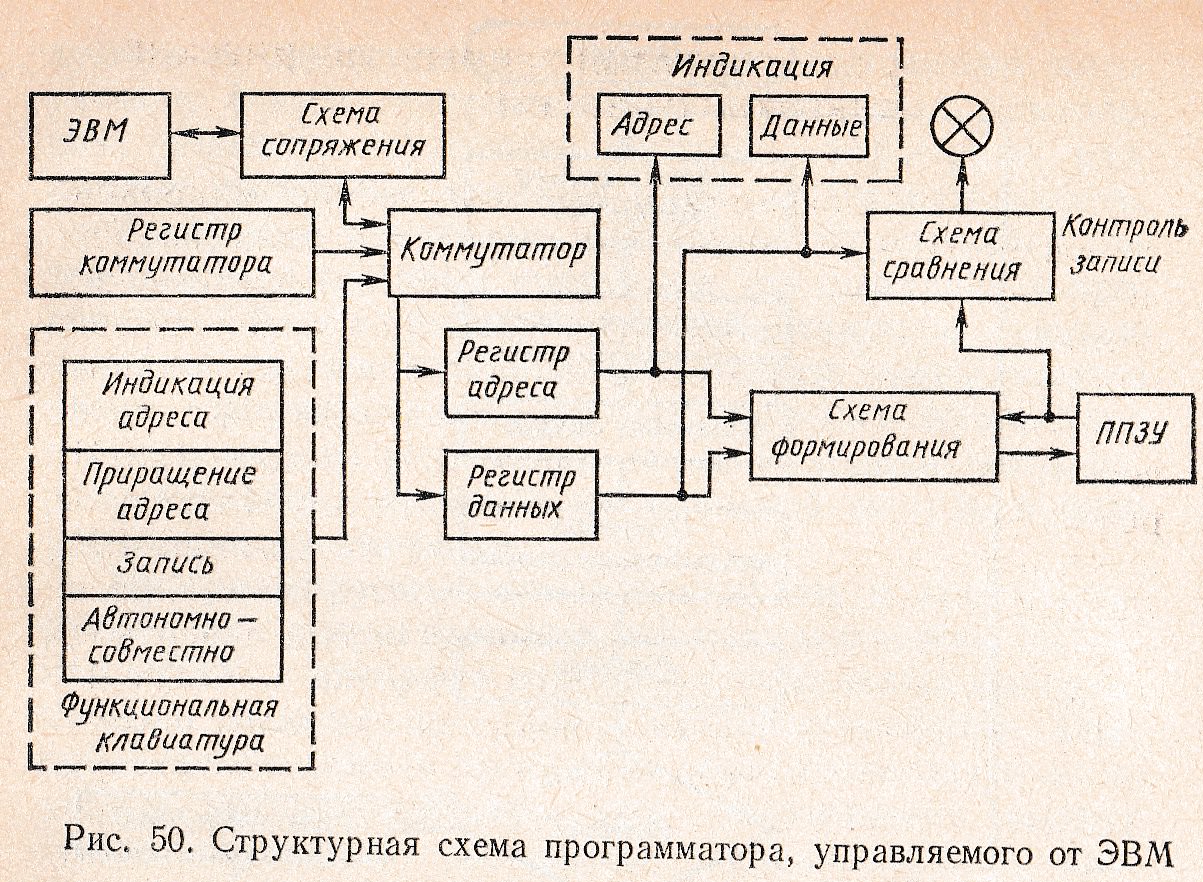
На рис. 50 дана структурная схема программатора, управляемого от ЭВМ с соответствующим программным обеспечением. ЭВМ задает темп записи, выдает адреса и данные, причем в ходе работы машина выполняет необходимую перекорректировку адресов и данных, а также упаковку записи. Функциональная клавиатура программатора позволяет вести работу в автономном режиме или совместно с ЭВМ. Программаторы, как правило, универсальные — для обработки ППЗУ различных типов. Для согласования прибора с конкретным ППЗУ в комплект программаторов могут входить согласующие модули.