Исполнительные элементы предназначены для непосредственного воздействия на управляемый объект или его органы управления. Исполнительные элементы, применяемые в системах автоматики, очень разнообразны. По принципу действия они делятся на электрические, механические, гидравлические, пневматические и комбинированные.
По конструкции различают электронные, электродвигательные, электромагнитные, поршневые, мембранные и комбинированные исполнительные элементы.
Исполнительные элементы должны удовлетворять следующим требованиям:
- мощность их должна превосходить мощность, необходимую для приведения в движение объекта управления или его органов во всех режимах работы;
- статические характеристики должны быть по возможности линейными и иметь минимальные зоны нечувствительности, как наиболее мощные функциональные звенья автоматических систем регулирования, они должны обладать достаточным быстродействием;
- регулирование выходной величины должно быть по возможности простым и экономичным;
- они должны иметь малую мощность управления.
В качестве исполнительных элементов в системах автоматики в основном применяют мощные электромагнитные реле, электромагниты, электродвигатели, электромагнитные муфты, мембранные и поршневые, гидравлические и пневматические двигатели.
Электродвигатели постоянного тока широко применяют в устройствах автоматики в качестве исполнительных элементов, преобразующих электрическую величину — ток в механическую величину — вращающий момент. Двигатели постоянного тока в зависимости от способов возбуждения могут быть с параллельным, последовательным, смешанным и независимым возбуждением.
В маломощных электродвигателях для создания магнитного потока возбуждения часто используют постоянные магниты. В этом случае можно построить многополюсную машину постоянного тока, что упрощает коммутацию и обеспечивает равномерное распределение магнитной индукции в зазоре. Одним из примеров является высокомоментный двигатель, у которого высокое быстродействие достигается благодаря увеличению динамического момента при неизменном моменте инерции якоря.
Двигатели постоянного тока имеют следующие достоинства: широкий и бесступенчатый диапазон регулирования частоты вращения, который может быть обеспечен в пределах D = ΩMAX/ΩMIN = 15 … 5000, простоту регулирования частоты вращения; жесткие механические характеристики, удовлетворяющие требованиям к приводам станков, в частности, у двигателей с независимым, параллельным возбуждением; большую перегрузочную способность с коэффициентом перегрузки в пределах КП = МП/МН = 2,5 … 10, где МП — пусковой момент, МН — номинальный момент; сравнительно малую инерционность (достаточное быстродействие).
Однако у этих двигателей есть и существенные недостатки: сложность конструкции, сравнительно низкая надежность, значительные габаритные размеры на единицу мощности, а также то, что при их применении требуется преобразователь переменного тока в постоянный.
Электродвигатели переменного тока. По принципу действия их делят на синхронные и асинхронные. Более широкое распространение в автоматизированных системах получили асинхронные двигатели, которые разделяют на трехфазные с короткозамкнутой обмоткой ротора, с полым ферромагнитным ротором, с полым немагнитным ротором.
В машиностроении более широкое распространение получили трехфазные асинхронные двигатели, которые имеют следующие достоинства: малые габаритные размеры, простую конструкцию, высокую надежность (отсутствие подвижных контактов), жесткие механические характеристики (для двигателей с короткозамкнутым ротором). К недостаткам асинхронных двигателей нормального исполнения следует отнести: малую перегрузочную способность (КП = 15 … 25), узкий и ступенчатый диапазон регулирования частоты вращения (изменением числа пар полюсов). Однако за последнее время разработаны частотные полупроводниковые преобразователи, позволяющие осуществлять регулирование угловой скорости изменением частоты тока питающего напряжения.
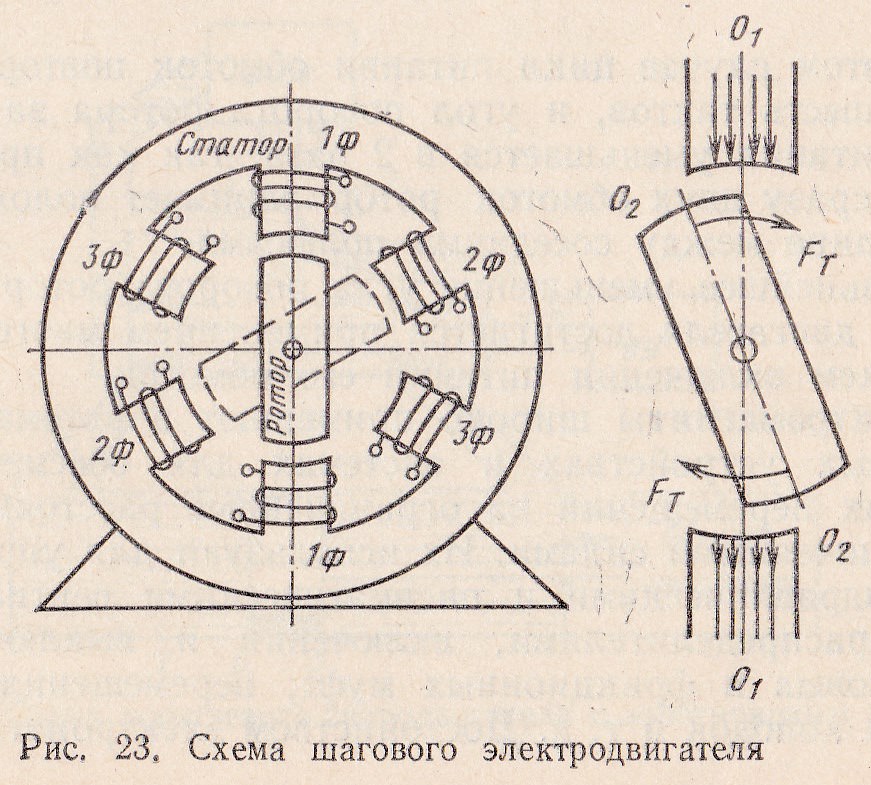 Шаговые электродвигатели представляют собой электромеханические устройства, преобразующие электрические сигналы в дискретные угловые перемещения вала. Статор двигателя (рис. 23) имеет три пары полюсов с тремя обмотками (1ф, 2ф, Зф). При подаче питания на обмотку 1ф возникает магнитное поле. И если ось ротора не совпадает с направлением силовых линий в возбужденных полюсах статора (положение наибольшей магнитной проницаемости), на ротор начинают действовать тангенциальные силы FТ, которые заставляют его повернуться до совпадения оси ротора с направлением магнитных силовых линий. Если снять питание с обмотки 1ф и подать ток на обмотку 2ф, то ротор повернется в положение, показанное пунктиром. При последовательной подаче импульсов тока на обмотки 1ф, 2ф, Зф с периодическим повторением ротор будет вращаться по часовой стрелке. Если последовательно подавать ток на обмотки в обратном порядке, ротор начнет поворачиваться в противоположном направлении.
Шаговые электродвигатели представляют собой электромеханические устройства, преобразующие электрические сигналы в дискретные угловые перемещения вала. Статор двигателя (рис. 23) имеет три пары полюсов с тремя обмотками (1ф, 2ф, Зф). При подаче питания на обмотку 1ф возникает магнитное поле. И если ось ротора не совпадает с направлением силовых линий в возбужденных полюсах статора (положение наибольшей магнитной проницаемости), на ротор начинают действовать тангенциальные силы FТ, которые заставляют его повернуться до совпадения оси ротора с направлением магнитных силовых линий. Если снять питание с обмотки 1ф и подать ток на обмотку 2ф, то ротор повернется в положение, показанное пунктиром. При последовательной подаче импульсов тока на обмотки 1ф, 2ф, Зф с периодическим повторением ротор будет вращаться по часовой стрелке. Если последовательно подавать ток на обмотки в обратном порядке, ротор начнет поворачиваться в противоположном направлении.
При таком питании трех обмоток полный электрический цикл питания проходит за три такта (три импульса тока). Можно подавать импульсы питания поочередно то на одну, то на две обмотки статора. Тогда для вращения по часовой стрелке порядок питания обмоток будет следующий: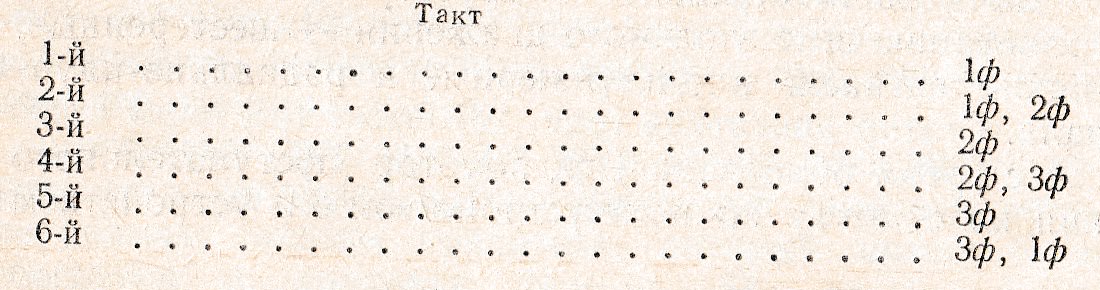
В этом случае цикл питания обмоток повторяется через шесть тактов, и угол поворота ротора за один такт питания уменьшается в 2 раза, так как при питании сразу двух обмоток ротор занимает положение посередине между соседними полюсами.
Дальнейшее уменьшение угла поворота ротора шагового двигателя достигается применением многотактных схем включения питания его обмоток.
Электромагниты широко применяют в автоматизированных устройствах и системах для обеспечения быстрых перемещений на ограниченные расстояния и с ограниченными силами. Их используют для управления гидравлическими и пневматическими вентилями, пневмораспределителями, включения и выключения кулачковых и фрикционных муфт, перемещения тормозных колодок и т. д. Достоинством электромагнитов является простота конструкции (отсутствие механизмов преобразования движений).
Электромагнитные муфты (ЭМ) нашли широкое применение в автоматизированных системах и устройствах для переключения кинематических цепей без прерывания движения, плавного пуска и торможения механизмов, регулирования скорости и для ограничения силы тока (защиты). В зависимости от конструктивного исполнения различают ЭМ: дисковые ЭТМ; бесконтактные дисковые МЭС, МЭТ; порошковые; скольжения. Существуют также фрикционные дисковые гидравлические муфты. Достоинство электромагнитных муфт в том, что с их помощью можно достигать плавного пуска и торможения, переключения кинематических цепей на ходу и т. д. Недостатки — малое быстродействие и механический износ.
Гидромоторы в зависимости от видов движения делят на гидромоторы поступательного и вращательного движения. Гидромоторы поступательного движения по конструкции бывают поршневые, диафрагменные (мембранные) одностороннего и двустороннего действия; гидромоторы вращательного движения — шестеренные, лопастные, аксиально-плунжерные и радиально-плунжерные.
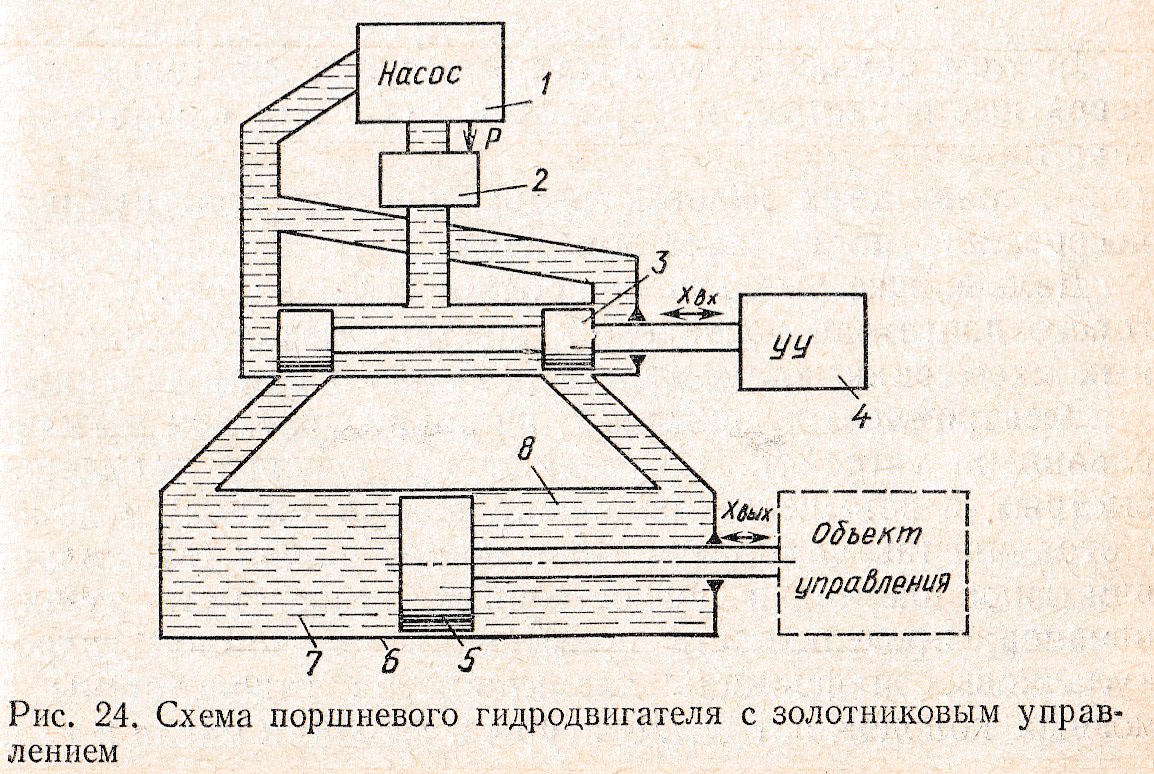 На рис. 24 показан гидромотор поступательного движения с золотниковым устройством 3 и устройством управления 4 (УУ). Вспомогательной энергией в этом устройстве является энергия жидкости, нагнетаемой в трубопровод насосом 1 под давлением р. Давление р поддерживается постоянным с помощью стабилизатора давления 2. Входным воздействием привода является перемещение штока поршня 5 гидромотора, которое передается непосредственно на объект управления. Поршень гидромотора перемещается в силовом цилиндре 6, имеющем две камеры (7 и 8). Если каналы, по которым жидкость, находящаяся под давлением, поступает в камеры гидромотора, перекрыты поясками золотника, то поршень неподвижен. При перемещении золотника 3 на расстояние хВХ в одну камеру гидромотора начинает поступать находящаяся под давлением жидкость, а вторая камера соединяется с трубопроводом, по которому жидкость возвращается к насосу (магистраль «Слив»), Давление в камерах гидромотора будет различным, и поршень под действием разности давлений начнет перемещаться. Скорость движения поршня зависит от объема жидкости, втекающей в одну камеру и вытекающей из другой в единицу времени. Этот объем зависит от размера отверстий, через которые может протекать жидкость после перемещения золотника на расстояние хВХ. Гидромотор с двумя камерами развивает практически одинаковые силы при подаче давления в одну или другую камеру, но направление движения изменяется на противоположное.
На рис. 24 показан гидромотор поступательного движения с золотниковым устройством 3 и устройством управления 4 (УУ). Вспомогательной энергией в этом устройстве является энергия жидкости, нагнетаемой в трубопровод насосом 1 под давлением р. Давление р поддерживается постоянным с помощью стабилизатора давления 2. Входным воздействием привода является перемещение штока поршня 5 гидромотора, которое передается непосредственно на объект управления. Поршень гидромотора перемещается в силовом цилиндре 6, имеющем две камеры (7 и 8). Если каналы, по которым жидкость, находящаяся под давлением, поступает в камеры гидромотора, перекрыты поясками золотника, то поршень неподвижен. При перемещении золотника 3 на расстояние хВХ в одну камеру гидромотора начинает поступать находящаяся под давлением жидкость, а вторая камера соединяется с трубопроводом, по которому жидкость возвращается к насосу (магистраль «Слив»), Давление в камерах гидромотора будет различным, и поршень под действием разности давлений начнет перемещаться. Скорость движения поршня зависит от объема жидкости, втекающей в одну камеру и вытекающей из другой в единицу времени. Этот объем зависит от размера отверстий, через которые может протекать жидкость после перемещения золотника на расстояние хВХ. Гидромотор с двумя камерами развивает практически одинаковые силы при подаче давления в одну или другую камеру, но направление движения изменяется на противоположное.
Существуют однокамерные гидромоторы, у которых обратное движение осуществляется под действием возвратной пружины, т. е. рабочий ход у них односторонний.
Достоинства гидромоторов: простота конструкции, присущая поршневым лопастным и шестеренным двигателям, возможность получения больших сил и мощностей, плавных движений; жесткие механические характеристики; возможность получения прямолинейных и вращательных движений; широкий диапазон регулирования скорости. Применяют два способа регулирования — объемный (изменение подачи насоса) и дроссельный (регулирование изменением давления). Гидромоторы имеют и существенные недостатки: утечка масла, необходимость применения автономной гидросистемы, зависимость характеристик гидросистемы и гидродвигателя от температуры и вязкости масла и т. д.
Пневматические двигатели. По принципу действия пневмодвигатели можно разделить на поршневые и диафрагменные (мембранные) одностороннего и двустороннего действия. Регулирование скорости осуществляется так же, как в гидромоторах. Достоинства: способность развивать большие силы при малых габаритных размерах, простота конструкции, а также то, что для согласования с объектом регулирования не требуются редукторы. Основной недостаток — недостаточная жесткость механических характеристик