Системы числового программного управления ПР расширяют технические возможности ПР и позволяют обойтись (в отличие от цикловых систем программного управления) без позиционирования рабочих органов манипулятора в отдельных точках. Это обусловливает более широкое применение СЧПУ в различных областях и с различной проблемной ориентацией. Кроме того, ПР с ЧПУ могут применяться для обслуживания одного или нескольких объектов, т. е. управлять не только ПР, но и технологическим оборудованием. Такие УЧПУ могут входить также в комплекс оборудования, которые управляются от ЭВМ более высокого ранга.
При выборе структуры системы управления ПР ориентируются на возможность создания ряда модификаций УЧПУ с минимальной избыточностью функциональных модулей и других аппаратных средств. Поэтому УЧПУ промышленными роботами имеют следующие характеристики:
- число управляемых координат 3—8;
- объем оперативной памяти 100—1500 кадров;
- число технологических команд 15—128;
- схема организации памяти (оперативная память, перепрограммируемая постоянная);
- тип привода (следящий дискретный на постоянном, переменном токе, гидравлический, пневматический, комбинированный);
- тип связи и управления приводами;
- вид применяемых датчиков и измерительной системы (аналоговые, фазовые, фотоимпульсные датчики и т. д.);
- состав УП, подпрограмм и обслуживающих программ;
- состав внешних устройств и способ организации интерфейса;
- состав диагностических программ и программ контроля за состоянием оборудования;
- специализированного и математического обеспечения.
Информационно-вычислительные возможности таких систем управления различны, что определяет область их применения.
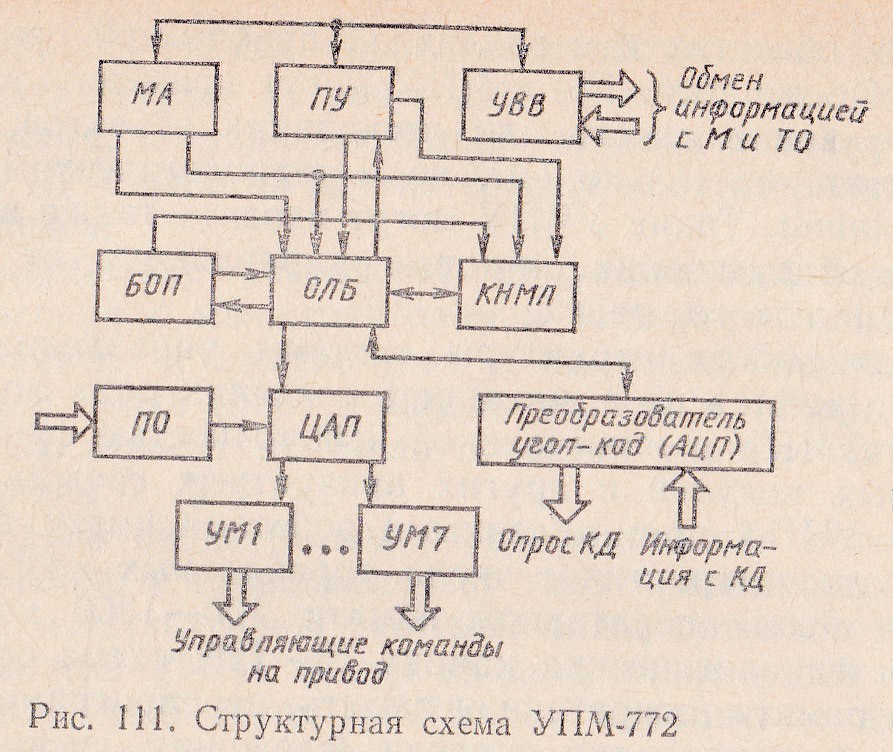 На рис. 111 показана УЧПУ УПМ-772. Это устройство предназначено для управления манипулятором и технологическим оборудованием при автоматизации операций, связанных с разгрузкой-загрузкой технологического оборудования, сборочными операциями, контрольными операциями (машины автоматического контроля), точечной сваркой и т. д. в условиях массового и крупносерийного производства. Устройство числового программного управления позиционного типа обеспечивает управление манипулятором со следящим и электрогидравлическим приводом, где в измерительной системе используются двухступенчатые вращающиеся трансформаторы (канал грубого и точного отсчета), фотоэлектрические кодовые датчики и т, д.
На рис. 111 показана УЧПУ УПМ-772. Это устройство предназначено для управления манипулятором и технологическим оборудованием при автоматизации операций, связанных с разгрузкой-загрузкой технологического оборудования, сборочными операциями, контрольными операциями (машины автоматического контроля), точечной сваркой и т. д. в условиях массового и крупносерийного производства. Устройство числового программного управления позиционного типа обеспечивает управление манипулятором со следящим и электрогидравлическим приводом, где в измерительной системе используются двухступенчатые вращающиеся трансформаторы (канал грубого и точного отсчета), фотоэлектрические кодовые датчики и т, д.
УЧПУ включает в себя несколько функциональных блоков. Операционно-логический блок (ОЛБ) совместно с микропрограммным автоматом (МА) выполняет управление взаимодействием всех блоков устройства, а также осуществляет центральное управление и обработку арифметической и логической информации. Блок оперативной памяти (БОЛ) служит для хранения оперативной информации и рабочей УП объемом 100 кадров. Кассетный накопитель на магнитных лентах (КМНЛ) является архивной и библиотечной памятью, в которой хранятся УП, УП обработки данных и справочная информация. Пульт управления (ПУ) предназначен для управления в наладочных режимах, оперативного вмешательства в работу устройства и индикации необходимой информации оператору. Устройство ввода-вывода (УВВ) предназначено для связи УЧПУ с манипулятором, технологическим оборудованием (выдает команды на электроавтоматические устройства манипулятора, технологическое оборудование и принимает сигналы подтверждения исполнения, сигналы состояний); другими внешними устройствами.
Пульт обучения (ПО) предназначен для задания режимов работы, номеров, исполняемых УП, кадров, команд условных переходов, параметров средств обучения; индикации содержания кадра, номера УП, состояния оборудования, видов блокировок и подтверждения исполнения команд. Пульт обучения содержит органы задания координат перемещения, скорости движения по координатам, управления захватными устройствами, задания информации по другим технологическим командам, управления адресацией записи. Цифроаналоговый преобразователь (ЦАП) выполняет преобразование цифровых кодов в уровень напряжений (аналоговый сигнал) для подачи преобразованных сигналов на усилители мощности (УМ1— УМ7), которые предназначены для усиления мощности сигналов управления до необходимого значения при подаче их на исполнительные органы манипулятора (на приводы по координатам движений). Преобразователь угол—код (АЦП) служит для опроса сигналов датчиков положения, записи и хранения в буферных регистрах измеренных величин и преобразования сигнала измерения в код УЧПУ.
УЧПУ УПМ-772 может работать в следующих режимах: исполнение программы (автоматический режим) обеспечивает:
- автоматическое выполнение УП, находящейся в блоке оперативной памяти;
- режим поиска кадра, предназначенный для поиска кадра УП по метке или номеру, указанному на пульте обучения или пульте управления;
- режим обучения для исполнения команд, набранных на пульте обучения с автоматической записью в блок оперативной памяти (переадресация автоматическая);
- режим начальной установки; режим разметки магнитной ленты.
Контурные УЧПУ проблемно сориентированы на управление ПР и роботизированными технологическими комплексами, где управление движениями звеньев осуществляется по жестко заданной траектории и с заданной скоростью движения на участке перемещения. УЧПУ предусматривает управление электрогидравлическим приводом, электрическим приводом на постоянном или переменном токе, где в качестве регулятора используется тиристорный преобразователь с ШИМ- или ЧИМ-управлением. В измерительной системе устройства управления используются фотоэлектрические датчики.
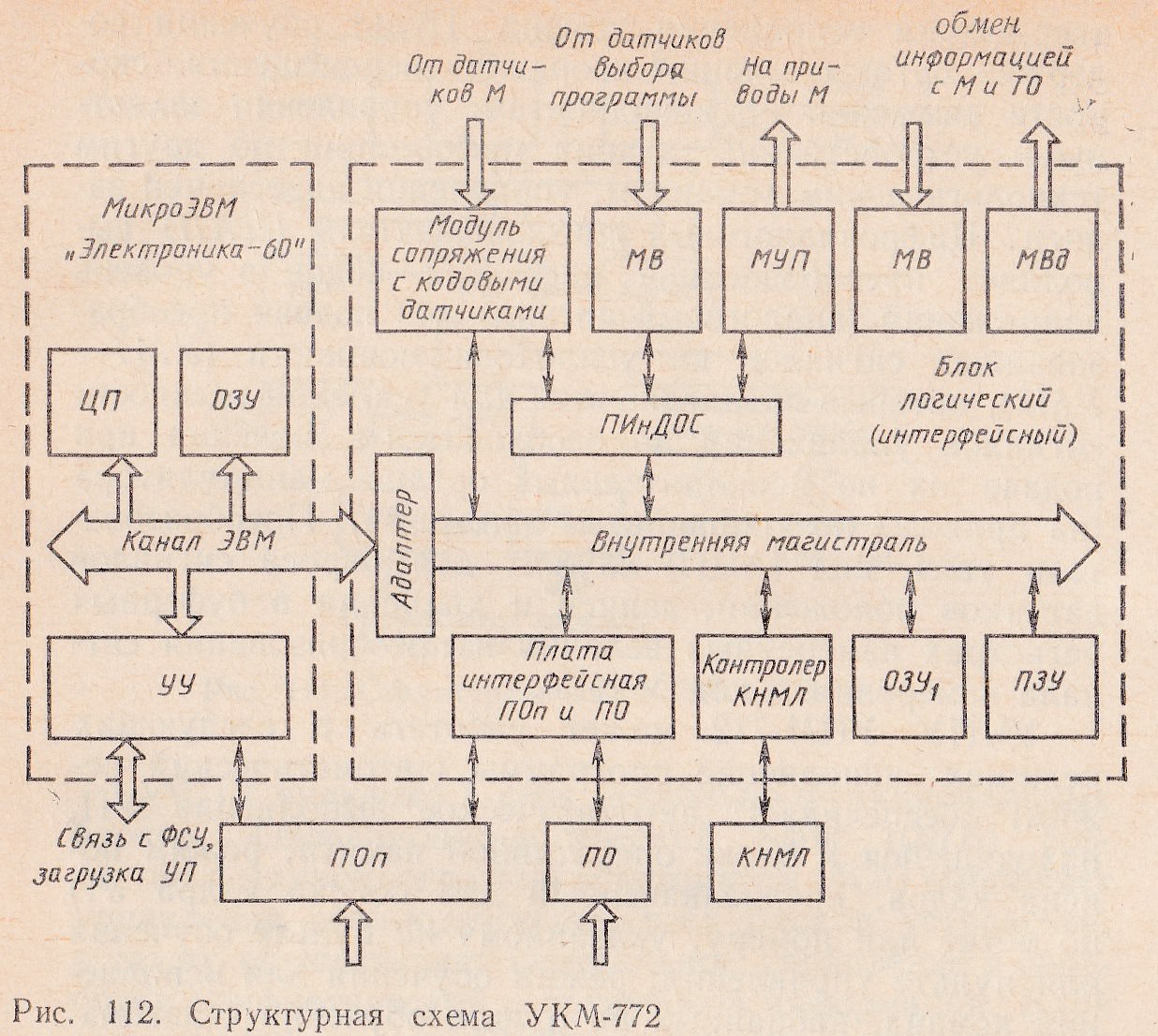 Структурная схема УЧПУ УКМ-772 дана на рис. 112. УКМ-722 включает в себя несколько функциональных модулей. Модуль центрального процессора (ЦП) является составной частью микроЭВМ «Электроника-60». Он выполняет обработку информации управления, математическое и программное обеспечение управления. Оперативное запоминающее устройство (ОЗУ) выполняет хранение УП и другой оперативной информации, промежуточных вычислений, информации программного и математического обеспечения, программы управления микроЭВМ и т. д. Постоянное запоминающее устройство (ПЗУ) осуществляет хранение постоянного программного обеспечения УЧПУ (программы управления микроконтроллерами и другими программными автоматами), отдельных стандартных программ и подпрограмм, тестовых программ и т. д. Магистральный внутренний канал микроЭВМ через специальный внешний интерфейс (типа адаптера) может быть связан с ЭВМ более высокого ранга и периферийными устройствами системы управления ПР.
Структурная схема УЧПУ УКМ-772 дана на рис. 112. УКМ-722 включает в себя несколько функциональных модулей. Модуль центрального процессора (ЦП) является составной частью микроЭВМ «Электроника-60». Он выполняет обработку информации управления, математическое и программное обеспечение управления. Оперативное запоминающее устройство (ОЗУ) выполняет хранение УП и другой оперативной информации, промежуточных вычислений, информации программного и математического обеспечения, программы управления микроЭВМ и т. д. Постоянное запоминающее устройство (ПЗУ) осуществляет хранение постоянного программного обеспечения УЧПУ (программы управления микроконтроллерами и другими программными автоматами), отдельных стандартных программ и подпрограмм, тестовых программ и т. д. Магистральный внутренний канал микроЭВМ через специальный внешний интерфейс (типа адаптера) может быть связан с ЭВМ более высокого ранга и периферийными устройствами системы управления ПР.
Устройство управления (УУ) является составной частью микроЭВМ и представляет собой микропрограммный автомат, предназначенный для управления микро-ЭВМ и другими периферийными устройствами, которые входят в контурную СЧПУ. Устройство управления может быть связано с ЭВМ высшего ранга и через внешний интерфейс — с фотосчитывающими и другими устройствами, дающими возможность загружать УП и другую информацию с перфоленты и других внешних запоминающих устройств. Пульт оператора (ПОn) обеспечивает операционное управление УЧПУ (загрузку УП, индикацию необходимой информации на дисплей и т. д.). Пульт обучения (ПО) служит для управления ПР в ручном и наладочном режимах, а также формирования управляющей программы с записью в ОЗУ методом обучения и ее просмотра, редакции и упаковки. Интерфейсная плата для связи с пультом обучения и пультом оператора управляет обменом информации процессора и других внешних устройств с ПОn.
Кассетный накопитель на магнитной ленте (КНМЛ) и контроллер связи с кассетным накопителем предназначен для хранения архивных программ и библиотечной информации, и вызова информации по запросам. Оперативное запоминающее устройство (03У1) входит в состав УЧПУ и служит для хранения УП промышленным роботом и технологическим объектом, а также другой оперативной информации. Плата интерфейсная для связи с датчиками обратной связи (ПИнДОС) выполняет обработку полученной информации от измерительной системы ПР и технологического объекта, а также от датчиков состояний и блокировок. Модуль сопряжения с кодовыми датчиками представляет собой АЦП и другие устройства для передачи информации от датчиков манипулятора. Модуль ввода (МВ) передает информацию от датчиков выбора программы управления и датчиков технологических параметров М, ТО. Модуль управления приводами (МУП) управляет приводами звеньев манипулятора. Модуль вывода (МВд) осуществляет выдачу команд на электроавтоматические устройства манипулятора и технологического объекта.
Развитое программное обеспечение устройства дает возможность программировать необходимые функции управления логикой; организацию УП с наличием отдельных подпрограмм, стандартных циклов, процедур обслуживания и т. д. Программное обеспечение построено по модульному принципу, что позволяет реализовать управление позиционированием и движениями по жесткой траектории.
Для управления роботизированными технологическими комплексами создана гамма УЧПУ позиционноконтурного управления для автоматизации основных и вспомогательных технологических операций с учетом различных иерархических уровней управления роботизированными техническими комплексами, которые могут входить также в технологические комплексы более высокого уровня. Устройства позиционно-контурного управления строят на базе микроЭВМ по модульному принципу, что дает возможность варьировать функциональные возможности УПКМ.