В современных СЧПУ приводы являются одним из основных узлов, определяющих производительность и точность реализации управляющей программы, а также средствами реализации адаптивного управления по многим регулируемым технологическим параметрам. УЧПУ позволяет практически безынерционно сформировать сигнал управления приводом, обеспечивающим движение позиционирования, движение по жесткой заданной траектории или регулирование какого-то параметра. В этих направлениях идет совершенствование приводов, реализующих практически все команды управления технологическим объектом.
За последнее время особенно совершенствуют в приводах системы управления тиристорными преобразователями, которые создаются на базе микропроцессорной техники, измерительные системы и датчики, а также исполнительные двигатели. Кроме того, разрабатываемые приводы строят по принципу автоматического регулирования, позволяющему создать необходимое быстродействие, жесткость механических характеристик с учетом всех возмущающих воздействий (широкий диапазон регулирования частоты вращения, изменение сил резания и т. д.) и возможность обеспечения адаптивного управления по необходимым технологическим параметрам в адаптивных УЧПУ. Кроме того, современные приводы разрабатывают с учетом использования в управлении УЧПУ, построенных на базе микро-ЭВМ.
В настоящее время широкое распространение получили приводы с применением тиристорных или других полупроводниковых преобразователей, а в качестве системы управления преобразователями используют микроЭВМ, в наибольшей степени удовлетворяющих необходимым требованиям, предъявляемым к СЧПУ. В СЧПУ, созданных на базе микроЭВМ, широкое распространение получил цифровой следящий привод, в котором программными средствами осуществляются все основные задачи управления: сравнение заданного положения управляющего органа с фактическим (сравнение заданных технологических параметров с действительными значениями их в объекте); преобразование сигнала рассогласования в сигнал управления тиристорным преобразователем с преобразованием аналогового сигнала в цифровой код.
Благодаря использованию цифрового следящего привода (ЦСП) и программного управления достигаются высокие технические показатели и гибкость применяемого привода, т. е. улучшаются статические и динамические характеристики, способность самонастраиваться к различным законам регулирования. Вследствие программного управления приводом при общих законах управления формальные параметры управления приводом в УП могут меняться на фактические в соответствии с конкретной задачей управления. Кроме того, появляется возможность решать задачи диагностирования неисправностей и давать о них сообщения или локализировать их. В ДСП должны быть решены следующие задачи: выбран закон регулирования, обеспечивающий необходимые качества привода при относительно простом алгоритме управления; обеспечено необходимое быстродействие, т. е. выбраны: необходимое время цикла вычисления (Тц), дискретность измерителя-преобразователя, длина слова для обмена информацией микроЭВМ с измерительной системой и системой управления тиристорным преобразователем.
Высокие качества регулирования при достаточно большой частоте операций и сравнительно небольшом объеме памяти, занятой под программу регулирования, достигаются интегральным законом регулирования (И) или пропорционально-интегральным (ПИ) регулированием в контуре управления по положению и пропорционально-интегрально-дифференциальным (ПИД) регулированием в контуре управления по скорости. При расширении технологических возможностей в современных станках и других технологических объектах необходимо обеспечивать диапазон регулирования D = 1 : 10 000 при скорости быстрого хода 10 м/мин и более.
Программно-математическое обеспечение ЦСП делится на два уровня: программы регулирования и управления в реальном масштабе времени; функциональные программы, которые обеспечивают начальные установки привода, диагностирование сбоев, отображение неисправностей и т. д.
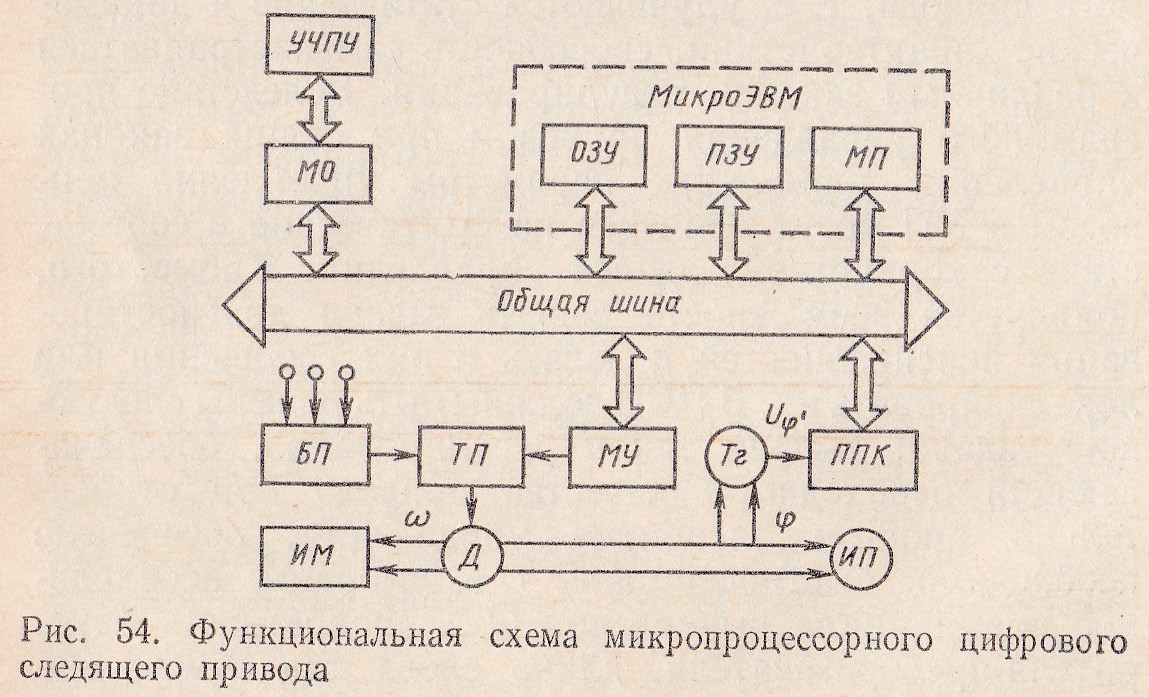
На рис. 54 представлена функциональная схема микропроцессорного цифрового следящего привода, который является составной частью СЧПУ. УЧПУ, входящее в СЧПУ, построено на базе микроЭВМ и сориентировано на управление конкретным технологическим объектом, на базе микроЭВМ построен и цифровой следящий привод. УЧПУ обменивается информацией с микроЭВМ, следящим приводом и объектом управления через модуль обмена (МО) посредством общей шины обмена. МикроЭВМ включает в себя микропроцессор (МП) с устройством управления; постоянное запоминающее устройство (ПЗУ) для хранения постоянной информации; оперативное запоминающее устройство (ОЗУ), в котором хранятся управляющие программы и другая оперативная информация.
Цифровой следящий привод включает в себя
- тиристорный преобразователь (ТП), выполняющий функции регулирующего и преобразующего устройства;
- блок питания преобразования (БП);
- модуль управления (МУ), который обеспечивает цифровое управление тиристорным преобразователем;
- преобразователь перемещения в код (ППК), представляющий собой аналого-цифровой преобразователь;
- измеритель-преобразователь (ИП), выполняющий функции датчика обратной связи по положению для обеспечения позиционно интегрирующего регулирования;
- тахогенератор (Тг), обеспечивающий дифференциальное (Д) регулирование, т. е. регулирование по скорости (регулирование по первой производной от положения);
- исполнительный механизм (ИМ) объекта управления.