Контурные УЧПУ объединяют группу устройств, в которых управление движениями рабочих органов осуществляется по жестко заданной траектории с одновременным управлением скоростью во время движения, так как в большинстве случаев управление движениями обусловливает формирование геометрических параметров изделий. Поэтому УЧПУ для контурного управления по своей функциональной структуре идентичны, различие заключается в числе управляемых координат, способе расчета траектории движения, виде измерительных систем, приводов и способах ввода и хранения УП и другой информации.
На рис. 68 представлена типовая структурная схема непрерывного УЧПУ, которая включает в себя несколько устройств.
Пульт оператора (ПО) предназначен для оперативного вмешательства в работу системы и получения необходимых ответов. Он предназначен для выбора режимов работы, пуска-останова, выдачи ручных команд, а также для получения ответов о работе СЧПУ, причинах прерывания исполнения УП, о месте и причинах сбоя, положении рабочих органов и исполнении технологических команд.
Пульт коррекции (ПК) обеспечивает введение и хранение коррекции положения рабочих органов и положения инструмента по действующим координатам. Слова, содержащие коррекции, включают в себя следующие элементы:
- LЗР [а], где L — заявка на коррекцию в УП;
- 3Р — указывает в программе вид коррекции и номер корректора, к которому необходимо обратиться;
- [а] —набранное число коррекции на переключателе, т. е. оперативное вмешательство по заявке.
Кроме того, пульт коррекции имеет клавиатуру для ручного ввода и отработки информации (тестовая отработка отдельных команд или кадров).
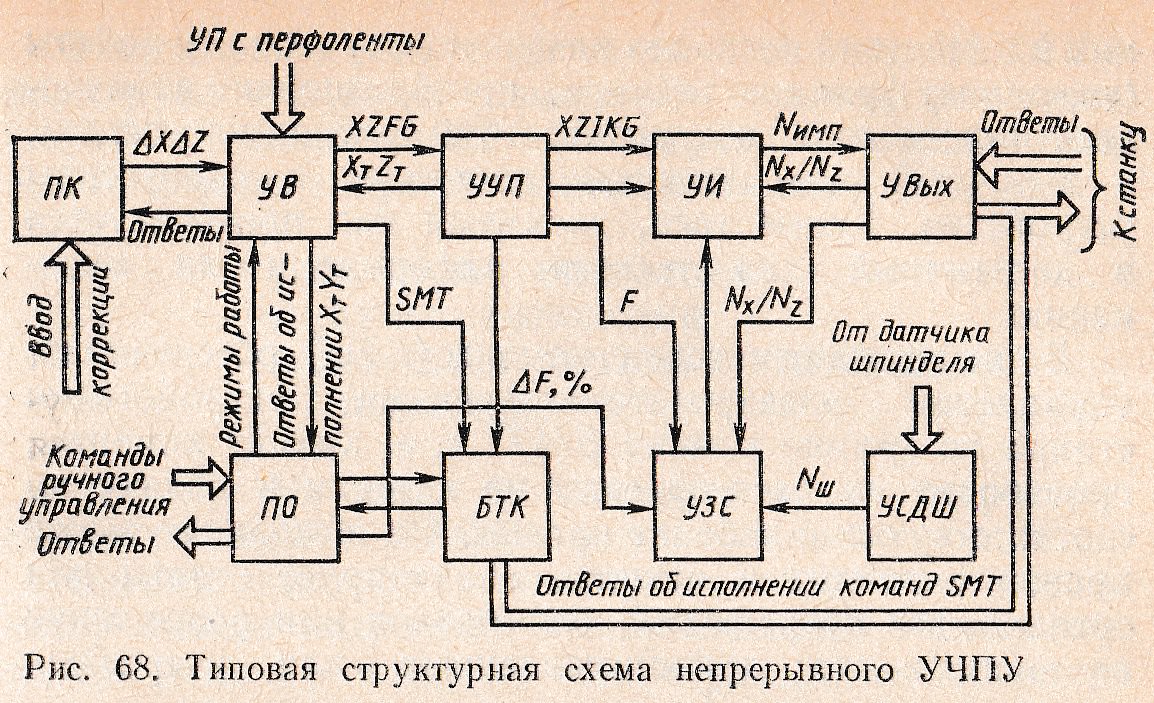
Устройство ввода (УВ) предназначено для ввода УП с перфоленты, команд с ПО и коррекции с ПК, для расшифровки адресов команд, хранения их содержимого и передачи содержимого команд по соответствующим адресам. Кроме того, устройство обеспечивает контроль вводимой информации по паритету и длине слова.
Устройство управления преобразованием (УУП) служит для управления всеми узлами УЧПУ, согласования их действий согласно назначенному режиму работы (выполняет функцию таймера), преобразования двоично-десятичного кода, поступающего с программоносителя, в двоичный код, который поступает в процессоры устройства. Кроме того, двоичный код преобразуется в десятичный для выдачи информации на индикацию.
Блок технологических команд (ВТК) обеспечивает управление электроавтоматическими устройствами станка по группе команд БМТ, т. е. хранит команды, производит их расшифровку по адресам и подачу на соответствующие рабочие органы. Он выполняет также хранение команд и ответов, анализирует ответы для организации прерываний, блокировок или разрешение на исполнение приостановленных или очередных команд.
Устройство интерполяции (УИ) представляет собой специализированный процессор для расчета траектории движения рабочих органов методом линейно-круговой интерполяции и выдачи управляющих импульсов на управляемые координаты, чтобы обеспечить движение по расчетной траектории с заданными значениями перемещений, выработку сигнала конца отработки кадра (КОК).
Устройство задания скорости (УЗС) обеспечивает заданную скорость перемещения согласно запрограммированному значению скорости подачи по адресу F, коррекцию скорости подачи ручным управлением, режим разгона и торможения рабочих органов, постоянство контурной скорости резания с учетом следующих возмущающих воздействий: число движений по координатам, которые участвуют в формообразовании одновременно, угол наклона обрабатываемой поверхности к оси вращения заготовки (жесткость механических характеристик обеспечивается ±5 % с учетом программных возмущений).
Устройство выхода (УВых) осуществляет управление приводами подач по задействованным координатам в СЧПУ. Это устройство выполняется в двух модификациях для управления шаговым приводом и следящим. В УЧПУ с шаговым приводом данное устройство выхода обеспечивает также выход рабочих органов в фиксированные (исходные) точки по сигналам датчиков, которые установлены на станке.
Устройство связи с датчиком шпинделя (УСДШ) формирует импульсы управления подачей шпинделя (мм/об) по команде GЗЗ с блокировкой движения по оси X (вместо скорости подачи в мм/мин).