В первых образцах дискретного привода максимальная частота не превышала ƒMAX ≤ 1500 Гц, в системах ЧПУ второго поколения она возросла до 8000 Гц, а в 1974—1975 гг. были разработаны шаговый привод и устройства ЧПУ на частоты холостых ходов ƒMAX = 16 000 Гц. Простота структурной схемы шагового привода позволила сократить сроки проектирования систем ЧПУ и станков, обеспечить их наладку и ввод в эксплуатацию.
Привод подач с шаговыми электродвигателями ШД можно разделить на две группы:
- привод с силовым ШД, соединенным через кинематическую цепь с исполнительным механизмом;
- привод с управляющим ШД и промежуточным усилителем момента, выполненным в виде автономной следящей системы (обычно гидравлической). В первой группе динамические и статические характеристики привода определяются параметрами ШД, в то время как во второй группе они зависят от параметров следящей системы, быстродействие которой ниже, чем у ШД.
Создание следящего привода подач с высокомоментными электродвигателями, свободного от многих недостатков следящих приводов первых исполнений, значительно сузило область применения шагового привода в станках с ЧПУ. Следящий привод позволяет получить высокую точность при малых дискретах (1—2 мкм) и высоких скоростях холостых ходов (10—12 м/мин). Получение аналогичных режимов в шаговом приводе достигается электромагнитным делением шага, которое приводит к погрешности при изменении нагрузки на валу. Кроме того, КПД шагового привода ниже. Однако в станках, где необходимые параметры могут быть обеспечены шаговым приводом, ввиду его простоты, низкой стоимости и высокой надежности (отсутствие коллектора со щетками и измерительного преобразователя) шаговый привод продолжают использовать. Это относится к малым и средним станкам (электрофизическим, токарным, шлифовальным), особенно при значительном числе управляемых по программе координат. Наряду с приводом подач ШД применяют для управления различными вспомогательными механизмами станков (поворот и смещение план-суппортов, резцедержателей и т. п.).
В шаговом приводе наблюдается тенденция к отказу от применения гидроусилителей и применению силовых ШД. Обмотки ШД возбуждаются прямоугольными или ступенчатыми импульсами напряжения с изменяющейся в широких пределах частотой. Ступенчатому характеру напряжений на фазах ШД соответствует дискретное вращение электромагнитного поля в воздушном зазоре ШД, вследствие этого движение ротора на низкой частоте слагается из последовательности элементарных перемещений по апериодическому или колебательному закону. ШД с электронным коммутатором осуществляют преобразование унитарного кода в угол поворота вала. Каждому импульсу управления соответствует поворот вала на фиксированный угол (шаг двигателя), величина которого определена конструкцией ШД и способом переключения его обмоток. Частота вращения и суммарный угол поворота вала пропорциональны соответственно частоте и числу поданных импульсов управлений.
В отличие от синхронных электродвигателей ШД рассчитаны на вхождение в синхронизм из состояния покоя без скольжения и торможения без выбега ротора. Благодаря этому они обеспечивают в рабочем диапазоне частот внезапный пуск, остановку и реверс без потери информации, т. е. без пропуска шагов. Более легким для дискретного привода является режим плавного изменения частоты. В этом случае область частот, в которой привод устойчив, значительно расширяется.
Электрогидравлический шаговый привод выполняют с аксиально-поршневым гидромотором либо с гидроцилиндром. В последнем случае ШД вращает измерительный винт. Привод с гидроцилиндром применяют в малых станках (перемещения до 1 м). Наибольшее распространение получили комплектные электрогидравлические шаговые приводы с гидромотором (Э32Г18-32, ЭГ32Г18-34; ЭГ3218-35).
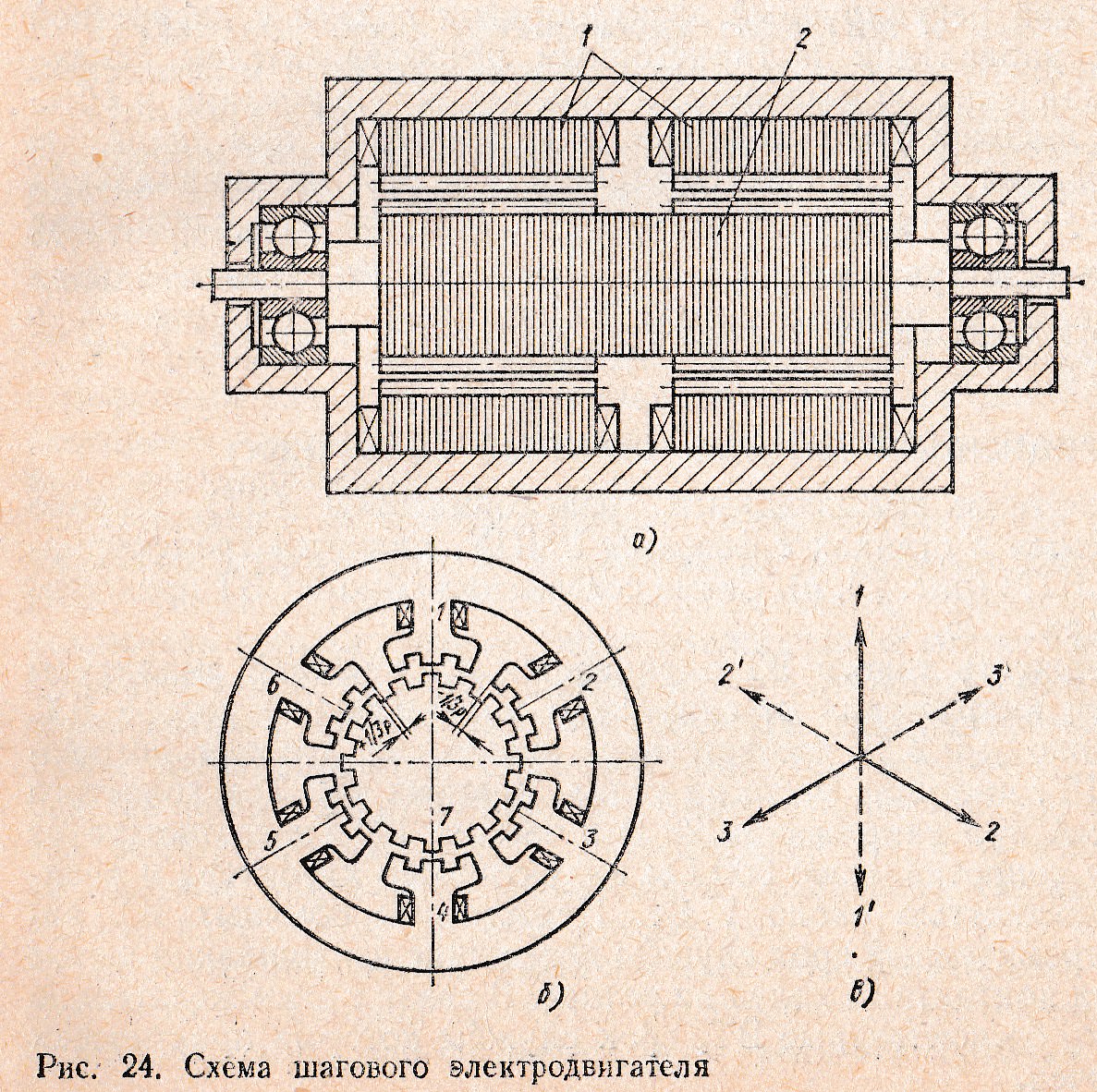
Схема широко применяемого электродвигателя типа ШД5Д-1М представлена па рис. 24. Электродвигатель состоит из двух одинаковых секций статора 1 (рис. 24, а) и общего ротора 2. Каждая секция статора (рис. 24, 6) имеет шесть зубчатых полюсов 1—6, взаимодействующих с зубчатым ротором 7, имеющим 20 зубцов. При этом зубцы каждого последующего полюса сдвинуты на 1/3 зубцового шага относительно предыдущего полюса, а обе секции статора сдвинуты на 1/2 зубцового шага между собой. Обмотки каждой пары противолежащих полюсов включены последовательно и образуют одну фазу. Таким образом, каждая секция электродвигателя имеет трехфазную обмотку, а с учетом второй секции электродвигатель имеет шестифазную обмотку.
Схема магнитных потоков, создаваемых этими шестью фазами в пределах 360 электрических (или 18 геометрических) градусов представлена на рис. 24, в, где сплошными векторами 1, 2, 3 представлены магнитные потоки, создаваемые тремя фазами первой секции, а штриховыми 1′, 2′, 3′ — второй. При подаче тока в первую фазу первой секции зубцы ротора встанут точно напротив зубцов первого и четвертого полюсов, на которых находится обмотка первой фазы. При подаче тока во вторую фазу первой секции ротор повернется на 1/3 зубцового шага, т. е. на 6° так, что его зубцы окажутся напротив зубцов полюсов 2 и 5. Если подать ток в третью фазу, то ротор повернется еще на 6°. Если подавать токи по очереди в обмотки второй секции, то ротор также будет поворачиваться на 6°, но со сдвигом на 3° относительно первой секции. Если ток подать сразу в первую фазу первой секции и в третью фазу второй секции, то ротор повернется на 1,5°, т. е. зубцы встанут посередине, между зубцами первой и второй секций. Таким образом, чередуя подачу токов то в одну фазу, то в две, получим непрерывное вращение ШД скачками по 1,5°. За 12 тактов ШД повернется на 360/20 = 18°, т. е. один оборот он сделает за 240 тактов.
Соответствующее чередование токов в обмотках ШД обеспечивается специальными кодовыми преобразователями, основными элементами которых являются счетчики импульсов со схемами обратных связей и мощные усилители, обеспечивающие токи в обмотках. При напряжении 48 В этот ШД обеспечивает частоту вращения до 4000 об/мин, что соответствует 16 000 Гц.
Следящий регулируемый электропривод подачи с дискретной системой управления и тиристорным преобразователем исключает ограничение по мощности, диапазону регулирования и обеспечивает высокое быстродействие. Так, например, при диапазоне регулирования Д = 10 000 с дискретой ∆ = 0,01 мм минимальная подача s = 0,3 мм/мин обеспечивается при частоте следования задаваемых импульсов ƒ З MIN = 0,3/(0,01*60) = 0,5 Гц, максимальная же частота следования задаваемых импульсов составит ƒ З MIN = 5000 Гц.