За последнее время широкое распространение получили оперативные УЧПУ оперативного типа, построенные на базе микроЭВМ. Эти устройства обеспечивают высокую оперативность управления технологическим оборудованием, придают ему гибкость в отношении перестройки на новый вид обработки или изготовление нового изделия.
Пульт оператора дает возможность оперативно с помощью клавиатуры загружать УП, параметры станка и УЧПУ в оперативную память символами кода ISO, просматривать УП, введенные параметры и при необходимости редактировать. Ввиду развитой оперативной, постоянной памяти предусмотрена организация архивов УП, массивов стандартных подпрограмм, программ коррекции и обслуживающих программ; массивов констант (параметров) технологического оборудования и УЧПУ, присущих данным видам технологических процессов. При наличии ПЗУ, в котором хранятся стандартные циклы, можно выполнять диалоговый режим, т. е. можно, вызывая хранящееся в ПЗУ содержание стандартных процедур (циклов) обработки, встраивать в них вместо формальных параметров фактические, которые соответствуют конкретному виду обработки или операции (в вызываемые адреса процедуры с помощью клавиш вводятся конкретные параметры), а также встраивать стандартные процедуры в УП. ПЗУ также позволяет организовать проверочные (тестовые) программы для диагностики неисправностей, обнаружения ошибок в УП и массивах параметров станка и УЧПУ.
На рис. 80 дана структурная схема оперативного УЧПУ, в которую входит несколько функциональных блоков.
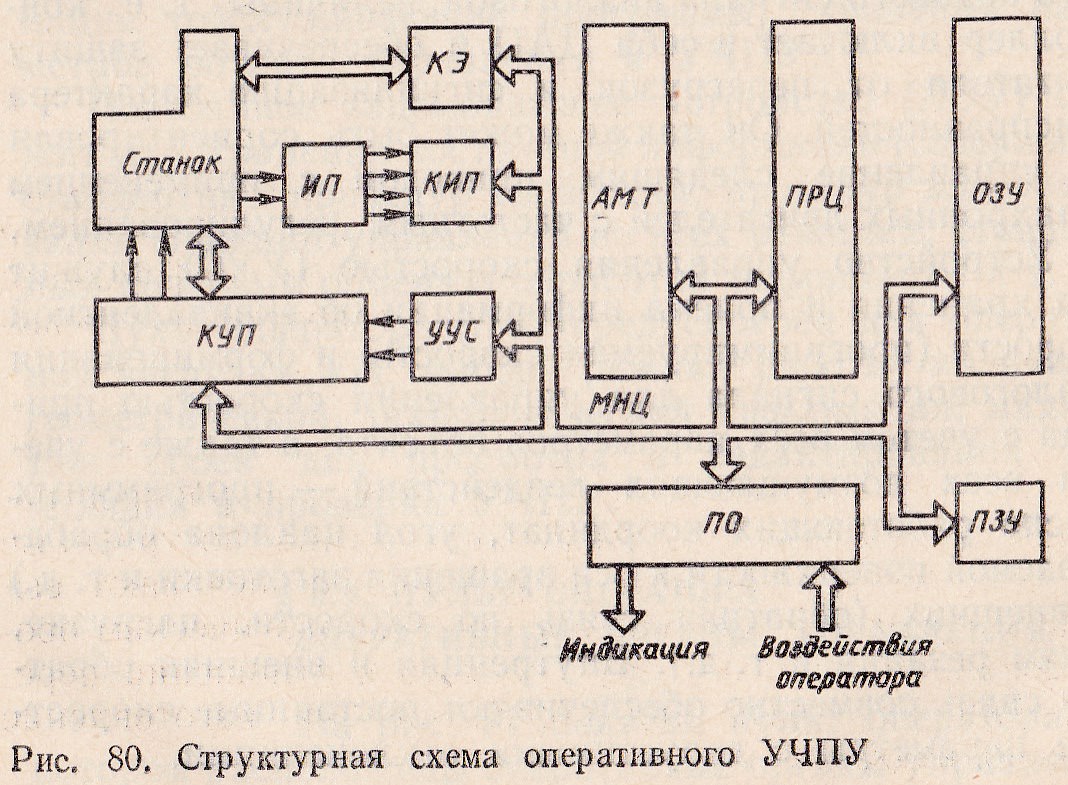 Ячейка центрального процессора (ПРЦ) предназначена для выполнения следующих операций: вычисления адресов данных и команд, обработки информации при обмене с другими блоками, обработки команд (операндов), управления программой и микропрограммой частью процедур, прерывания по некоторым командам, поступающим на отработку, или по командам, поступающим извне, а также обработки всей геометрической и технологической информации, встраивания в УП необходимых параметров и фрагментов, хранящихся в памяти УЧПУ; анализа и обработки информации, поступающей с объекта управления.
Ячейка центрального процессора (ПРЦ) предназначена для выполнения следующих операций: вычисления адресов данных и команд, обработки информации при обмене с другими блоками, обработки команд (операндов), управления программой и микропрограммой частью процедур, прерывания по некоторым командам, поступающим на отработку, или по командам, поступающим извне, а также обработки всей геометрической и технологической информации, встраивания в УП необходимых параметров и фрагментов, хранящихся в памяти УЧПУ; анализа и обработки информации, поступающей с объекта управления.
Адаптер магистрали и таймер (AMT) совместно с магистралью УЧПУ (МНЦ) представляют собой оперативный канал связи, который служит для обмена данными между процессором и устройствами связи со станком и другими блоками, задания времени в операциях обмена, установки приоритетов в прерываниях, расшифровки адресов и распределения команд по адресам и т. д.
Контроллер управления приводами (КУП) в зависимости от типа привода бывает двух модификаций: для управления приводом па постоянном токе и для управления приводом с асинхронными двигателями. Контроллер управления приводами на постоянном токе с ориентацией на следящий привод обеспечивает управление тиристорными преобразователями, формирование из числового кодового сигнала аналоговой величины, т. е. контроллер включает в себя ЦАП и обеспечивает защиту двигателя от перегрузок и сигнализацию характера неисправностей. Он также может быть сориентирован на управление следящим приводом с применением асинхронных двигателей с частотным регулированием.
Устройство управления скоростью (УУС) служит для хранения и приема информации об эквивалентной скорости (программируемая скорость) и формирования аналогового сигнала для управления скоростью привода с учетом всех параметров объекта, а также с учетом всех возмущающих воздействий — программных (число работающих координат, угол наклона обрабатываемой поверхности к оси вращения заготовки и т. д.) и внешних (обратная связь по скорости, нагрузке, силам резания и т д.). Внутренняя и внешняя обратная связь совместно обеспечиваю постоянные скоростные параметры с допустимыми отклонениями.
Контроллер электроавтоматики (КЭ) обеспечивает прием информации от узла электроавтоматических устройств станка, ее анализ, подачу управляющей и технологической информации в узел электроавтоматических устройств, организацию прерывания при наличии блокировок, анализ ответов, получаемых от станка (фотография состояния объекта), сигналы запроса на обмен информации.
Контроллер измерителей-преобразователей (КИП) выполняет прием информации о пути и направлении перемещения рабочих органов, преобразование измерительных импульсов в двоичный код, хранение информации и считывание ее в процессор; кроме того, КИП обеспечивает запрос связи с процессором и захват МНЦ, выдает сигнал прерывания по «О» метке.
Измеритель-преобразователь (ИП) преобразует угол поворота или линейное перемещение в периодические сигналы-импульсы, хранит информацию о знаке и значении перемещения. В схему входят датчики обратной связи, число их зависит от числа координат, по которым ведется измерение (в данном УЧПУ один из датчиков выполняет роль задающего устройства в режиме работы от маховичка).
Оперативное запоминающее устройство (ОЗУ) предназначено для хранения управляющих программ, программ математического обеспечения, обработки информации (обслуживающие программы), хранения параметров объекта управления и УЧПУ.
Постоянное запоминающее устройство (ПЗУ) служит для хранения постоянной информации (содержание стандартных процедур обработки, процедур для реализации функции управления во всех режимах, стандартных программ обмена и обработки информации и т. д.).
Пульт оператора (ПО) предусмотрен для оперативной загрузки УП, выбора режима работы, индикации геометрической, технологической информации, индикации сбоев для просмотра и редактирования УП, наладки и проверки УЧПУ.