В комплект электропривода включаются преобразователь и электродвигатель постоянного тока с широким диапазоном регулирования частоты вращения при постоянной предельной мощности.
Преобразователь состоит из тиристорного регулируемого выпрямителя для питания якоря электродвигателя, тиристорного или транзисторного регулятора для управления напряжением цепи возбуждения электродвигателя, устройств защиты и сигнализации. Тиристорный регулятор якорной цепи выполняется по трехфазной полностью управляемой мостовой схеме (для приводов мощностью 2,2 кВт допускается однофазная мостовая схема) и обеспечивает преобразование переменного напряжения в регулируемое по величине в широком диапазоне напряжения якоря электродвигателя постоянного тока.
Устройства защиты обеспечивают разделение преобразователей между собой и от сети (например, с помощью дросселей), а также защиту электродвигателя и других элементов электропривода от перегрузок и аварийных режимов. Эти устройства обеспечивают также защиту от помех. Преобразователи можно изготовлять со специальными электронными блоками: блоком постоянной скорости резания, цифроаналоговым преобразователем (ЦАП) с объемом не менее двух декад, блоком-интегратором, функциональным блоком задания частоты вращения и блоком позиционирования шпинделя. Питание электропривода производится от трехфазной сети с номинальным напряжением 220, 380, 440, 500 В (с допускаемыми отклонениями +10 и —15 %). Частота сети 50 Гц±2 % или 60 Гц ±2 %. Температура окружающего воздуха 5—45 °С, максимальная влажность 80 % при +30 °С.
Электроприводы должны обеспечивать работу в четырех квадрантах. Изменение полярности напряжения управления соответствует реверсированию электропривода. Электроприводы могут изготовляться с реверсом в цепи возбуждения или в цепи якоря Электродвигателя.
Сигнал управления, соответствующий максимальной частоте вращения, аналоговый, ±10 В; входное сопротивление не менее 2 кОм. Электропривод может выдавать в систему управления или в систему сигнализации следующие дополнительные сигналы: о достижении заданной частоты вращения, о перегрузке, о неисправности узлов электропривода и сигналы, пропорциональные токам якоря и обмотки возбуждения. Величина коэффициента пульсаций тока якоря не должна превышать 10 % на частотах вращения выше номинальной. Оговариваются значения допустимых суммарных погрешностей частоты вращения в различных диапазонах частоты вращения. Номенклатура преобразователей должна составлять не более шести типоразмеров на мощность от 2,2 до 200 кВт.
В перспективе силовые управляемые полупроводниковые вентили будут также основным элементом энерготехники, выполняющим функции преобразования и регулирования энергии в электроприводе. Совершенствование силовой полупроводниковой техники будет создаваться в направлении лавинных тиристоров и полностью управляемых вентилей (семисторов) с уменьшенными тепловыми потерями в устройстве и высокой перегрузочной способностью. Для гальванического разделения силовых цепей и цепей управления будут применять устройства с оптронной развязкой. Наиболее перспективны таблеточные транзисторные устройства с высокой степенью интеграции, с управлением силовой частью электропривода с помощью специальных интегральных микросхем от системы программного управления, выполненной на базе микропрограммных командоаппаратов.
При управлении электроприводом главного движения в основном будут применяться системы адаптивного управления, которые регулируют выходные параметры электропривода в функции различных факторов, влияющих на процесс обработки.
С учетом перспективных направлений и достижения развития станков с ЧПУ электроприводы главного движения могут иметь следующие технические характеристики:

В перспективе данные технические характеристики высокоавтоматизированных станков с ЧПУ и адаптивным управлением и системами поддержания постоянства скорости резания достигается в многоконтурных системах с использованием новейшей элементарной и конструктивной базой микропроцессоров.
Технические требования к современным электроприводам главного движения вызывают необходимость значительного расширения диапазонов изменения частот вращения при широком изменении нагрузок с одновременным улучшением качественных показателей электроприводов. Основное внимание обращают на динамические характеристики схем электроприводов.
На станках с ЧПУ применяют электроприводы как с однозонным регулированием частоты вращения путем изменения напряжения на якоре электродвигателя (М = const), так и с двухзонным регулированием, при котором во второй зоне изменение частоты вращения осуществляется регулированием тока в обмотке возбуждения (Р = const) при неизменном или маломеняющемся напряжении якоря.
Однозонные электроприводы применяют в станках, где мощность электропривода главного движения при максимальной частоте вращения превышает б кВт. Однозонные электроприводы в сочетании с высокомоментными электродвигателями позволяют получить системы максимального быстродействия в станках, у которых приведенные моменты инерции кинематических цепей к валу электродвигателя близки к моменту инерции приводного электродвигателя.
Основными недостатками таких электроприводов являются весьма низкий коэффициент использования электродвигателя и низкие энергетические показатели (КПД и cos ср) вследствие работы тиристорного преобразователя в зарегулированном режиме при больших углах управления тиристорами. Такие электроприводы применяют в небольших зубофрезерных станках с системами адаптивного управления, расточных, фрезерных, сверлильных и координатно-расточных станках. В большинстве станков с ЧПУ применяют электроприводы с двухзонным регулированием частоты вращения.
Использование однозонного электропривода ведет к повышению мощности тиристорного преобразователя, недоиспользованного электродвигателя, но мощности на верхних частотах шпинделя. Для питания цепей возбуждения электродвигателей постоянного тока свыше 20 кВт при двухзонном регулировании частоты вращения наиболее целесообразны многофазные схемы преобразователей. Многофазные схемы для питания цепей возбуждения электродвигателей улучшают динамические характеристики электроприводов в схемах с реверсом по полю, так как такие схемы позволяют получить большие форсировки по току возбуждения.
Одним из основных способов снижения массогабаритных показателей при одновременном улучшении динамических характеристик двухзоннорегулируемых электроприводов для станков средней мощности является использование мостовых, реверсивных, бестрансформаторных схем для питания цепей якоря и возбуждения электродвигателей.
В зависимости от требований к характеристикам электропривода применяют следующие варианты структурных схем систем двухзонного регулирования частоты вращения электродвигателя, классифицируемые по характеру исполнения входов электродвигателя с управлением напряжения на якоре:
- по замкнутому циклу до определенного уровня управляющего сигнала, а затем управление током возбуждения электродвигателя по замкнутому циклу с использованием той же главной обратной связи при неизменном напряжении на якоре (независимый принцип управления);
- но замкнутому циклу во всем диапазоне изменения частоты вращения при изменении потока электродвигателя в функции ЭДС или напряжения на его якоре (зависимый принцип управления).
Для стабилизации амплитудно-фазочастотных характеристик электроприводов во всем диапазоне входных сигналов требуется использовать адаптивные регуляторы, входящие непосредственно в структуру электропривода. Адаптивные регуляторы тока позволяют линеаризировать структуру в режиме прерывистых токов и тем самым резко улучшить динамические свойства системы автоматического регулирования. Адаптивные регуляторы частоты вращения позволяют обеспечить постоянство передаточной функции системы регулирования при ослаблении поля электродвигателя, что особенно важно при глубоком регулировании магнитного поля (до 10).
В технической документации к приводу главного движения приводят следующие данные: мощность на валу электродвигателя, кВт; цикл (особые режимы); тип электродвигателя, исполнение по монтажу и защите; номинальная частота вращения, об/мин; диапазон регулирования частоты вращения при постоянной мощности, при постоянном моменте; точность поддержания частоты вращения, %; частота вращения; число механических переборов и передаточное отношение от электродвигателя к шпинделю при каждом механическом переборе; момент инерции механической части привода, приведенный к валу электродвигателя на каждом механическом переборе, кг*м2; время разгона, торможения, реверса, с.
Система связи электропривода главного движения с устройством ЧПУ (УЧПУ) должна отвечать следующим техническим требованиям:
- управляющее напряжение, подаваемое от ЧПУ к электроприводу, должно быть ±10В постоянного тока с допустимой величиной пульсации не более 1%, и УЧПУ должно обеспечить пропорциональность этого напряжения величине требуемой частоты вращения электродвигателя;
- переключение механических диапазонов осуществляется командами УЧПУ;
- устройство ЧПУ должно обеспечивать возможность под-настройки управляющего напряжения на ±15% относительно каждого установочного значения;
- допуски на величину управляющего напряжения и величину дрейфа при изменении напряжения сети от 0,9UНОМ до 1,1 UНОМ и температуре окружающей среды от 5 до 45°С должны соответствовать установленным данным;
- входное сопротивление устройства управления электроприводом должно быть не менее 2кОм;
- передача сигнала управления на электропривод должна обеспечиваться при длине кабеля не более 20м;
- выход УЧПУ и цепь управления электропривода должны быть гальванически развязаны с силовой цепью электропривода;
- от УЧПУ к электроприводу замыканием контактов подается команда на включение привода. Останов электропривода производится при нулевой частоте вращения снятием команды на включение;
- от электропривода к УЧПУ подается команда на отключение УЧПУ вследствие неисправностей в электроприводе. Команда аварийного отключения действительна только при замыкании контактов УЧПУ;
- в УЧПУ формируется команда о соответствии фактической частоты вращения заданной.
Устройство числового программного управления формирует в коде ISO (аналогичный код ГОСТ 13052—74) следующие команды управления электроприводом главного движения:
- МОЗ — вращение шпинделя по часовой стрелке;
- М04 — вращение шпинделя против часовой стрелки;
- М05 — останов шпинделя;
- М38 — работа электропривода главного движения в первом механическом диапазоне;
- М39 — работа электропривода главного движения во втором механическом диапазоне;
- М40-45 — резерв для дополнительных переключений механических диапазонов;
- S1-S99 — номер частоты вращения шпинделя.
 Преобразование номера частоты вращения в аналоговый сигнал осуществляется в цифроаналоговом преобразователе (ЦАП), который обычно встраивается в УЧПУ. В современных системах ЧПУ, например, У852, предусмотрен ЦАП, который может формировать аналоговый сигнал управления с дискретой 0,01В. В некоторых случаях функции ЦАП выполняет дешифратор, встроенный в электроавтоматику станка или специальный блок, встроенный в приводы. В том и другом случае аналоговый сигнал формируется делителем напряжения.
Преобразование номера частоты вращения в аналоговый сигнал осуществляется в цифроаналоговом преобразователе (ЦАП), который обычно встраивается в УЧПУ. В современных системах ЧПУ, например, У852, предусмотрен ЦАП, который может формировать аналоговый сигнал управления с дискретой 0,01В. В некоторых случаях функции ЦАП выполняет дешифратор, встроенный в электроавтоматику станка или специальный блок, встроенный в приводы. В том и другом случае аналоговый сигнал формируется делителем напряжения.
Принципиальная схема задатчика частоты вращения, имеющего 20 фиксированных ступеней, величина каждой из которых может настраиваться независимо от других подбором резисторов R1— R20, приведена на рис. 9. Входным сигналом от УЧПУ является напряжение 1,5В (0,002 Вт), подаваемое на один из входов 1У— 20У положительной полярности относительно точки 1. В качестве первого каскада усиления входного сигнала в каждом канале задатчика используется элемент микросхемы VI—V5 (К2НТ013, всего пять корпусов), а в качестве второго каскада усиления — транзистор V6—V26 (ГТ321В). Конструктивно такой задатчик частоты вращения выполнен в виде печатной платы и может встраиваться в преобразователь электропривода или любой другой элемент электрооборудования станка.
В некоторых станках, например, лоботокарных, токарнокарусельных, где требуется обтачивание торца с постоянной, линейной скоростью, а также при управлении электроприводом главного движения от адаптивных устройств, необходимо осуществлять плавное регулирование частоты вращения. В таких случаях в системах управления предусматриваются контактные или бесконтактные аналоговые регуляторы в функции какого-либо параметра, например, диаметра обработки.
В систему управления электроприводом главного движения может быть заложен алгоритм, позволяющий выбрать частоту вращения электродвигателя и номер механического перебора, наилучшим образом соответствующие конкретному режиму обработки. Например, в режиме резьбонарезания мощность резания, как правило, значительно меньше номинальной мощности электродвигателя, но в этом режиме существенное значение имеет динамика электропривода. Следовательно, при включении самого быстроходного механического перебора, требуемая частота вращения электродвигателя достигается в первой зоне, т. е. без ослабления магнитного потока, что существенно уменьшает время переходных процессов пуска и торможения в электроприводе. Однако следует учесть, что введение быстроходного механического диапазона ведет к уменьшению передаточного отношения от электродвигателя к шпинделю н к увеличению момента инерции, приведенного к валу электродвигателя.
Электропривод, в свою очередь, может явиться источником информации о процессе резания. Измеряя силу тока якоря электродвигателя, а также напряжения в якорной цепи и цепи обмотки возбуждения, можно косвенно рассчитать мощность и момент резания, что используется в системах адаптивного управления. Измеряя неравномерность частоты вращения электродвигателя, можно определить устойчивость процесса обработки и в случае необходимости устранить резонансные явления.
Рассмотрим некоторые комплектные электроприводы главного движения с тиристорными преобразователями.
Электродвигатели постоянного тока для механизмов главного движения станков. Одним из важнейших элементов электропривода главного движения является электродвигатель. В механизмах главного движения станков с ЧПУ в основном применяются электродвигатели постоянного тока благодаря своим исключительным регулировочным свойствам, а также возможности изменения частоты вращения в определенном диапазоне с постоянством предельной мощности.
Размеры электродвигателя главного движения влияют на компоновку станка. У новых серий электродвигателей уменьшена высота оси вращения, что обеспечивает их лучшую встраиваемость в станки. Применение широкорегулируемых электродвигателей постоянного тока и постоянной мощности в механизмах главного движения станков значительно упрощает механическую часть привода, исключает полностью или сводит до минимума число ступеней редуктора, обусловливает увеличение производительности и повышает КПД электропривода.
Регулирование скорости электропривода главного движения требуется в основном при постоянной мощности. Электродвигатель с широким диапазоном регулирования обеспечивает наилучшие характеристики электродвигателя при режиме нагружения. Например, диапазон шунтового регулирования электродвигателей 2ПФШ равен 10. Применение в электродвигателях компенсационной обмотки исключает искажение магнитного поля полюсов, уменьшает индуктивность якорной цепи, снижает добавочные потери при ослабленном магнитном поле, улучшает линейность характеристики момент—ток.
Электроприводы постоянного тока серии ЭТЗ. Комплексные электроприводы постоянного тока серии ЭТЗ с тиристорными преобразователями используются в качестве регулируемых электроприводов главного движения металлорежущих станков и других механизмов. Электроприводы обеспечивают регулирование частоты вращения: в первой зоне — изменением напряжения на якоре электродвигателя; во второй зоне — изменением величины тока в обмотке возбуждения.
Электроприводы выпускают в комплекте с электродвигателями серии П, ПБСТ и 2П и рассчитаны для работы в режимах:
- продолжительном, кратковременном (продолжительностью периода неизменной номинальной нагрузки 10 мин);
- повторно-кратковременном с продолжительностью включения ПВ 15%.
Изменение направления вращения возможно при изменении полярности напряжения на обмотке возбуждения при сохранении неизменной полярности сигнала обратной связи, что может быть достигнуто применением соответствующей переключающей аппаратуры. В схеме изменения направления вращения двигателя должны быть предусмотрены соответствующие блокировки, исключающие возможность реверса тока обмотки возбуждения при вращающемся электродвигателе, и другие аварийные режимы.
Электропривод серии ЭТЗ имеет электродвигатель мощностью 1,1—22кВт; номинальное его напряжение равно 110, 220 и 340 В. Максимальная частота вращения электродвигателя зависит от его типа и обеспечивается в соответствии с техническими данными на электродвигатель, входящий в комплект электропривода. Минимальная частота вращения электродвигателя nMIN = 10 об/мин. Электроприводы ЭТЗ обеспечивают четкую и падежную работу от трехфазной сети переменного тока 380В частотой от 49 до 60 Гц при изменении напряжения ±10 % от номинального.
 Вся аппаратура электропривода открытого исполнения и предназначена для установки в электрошкафах или нишах станков. Место установки как преобразователя, так и электродвигателя должно быть защищено от попадания внутрь воды, масла, эмульсии, металлической стружки, абразивной пыли и т. п. Преобразователь и электродвигатель должны монтироваться в местах, где исключены резкие толчки и тряска. Допускается вибрация мест крепления с частотой 25 Гц при ускорении не более 0,7g.
Вся аппаратура электропривода открытого исполнения и предназначена для установки в электрошкафах или нишах станков. Место установки как преобразователя, так и электродвигателя должно быть защищено от попадания внутрь воды, масла, эмульсии, металлической стружки, абразивной пыли и т. п. Преобразователь и электродвигатель должны монтироваться в местах, где исключены резкие толчки и тряска. Допускается вибрация мест крепления с частотой 25 Гц при ускорении не более 0,7g.
Электропривод представляет собой замкнутую по частоте вращения систему автоматического управления с зависимым принципом управления магнитным потоком электродвигателя.
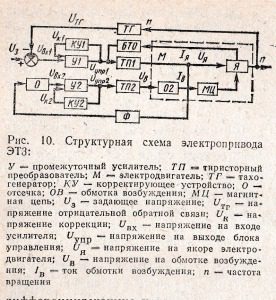
Структурная схема электропривода приведена на рис. 10. Электропривод работает следующим образом. Разность задающего сигнала U3 и сигнала обратной связи UTP подается на промежуточный усилитель постоянного тока, охваченный интегродифференцирующим корректирующим звеном КУ1. Сигнал управления UУПР, пропорциональный задающему сигналу U3, подается на вход тиристорного преобразователя якорной цепи ТП1, который обеспечивает регулирование напряжения якоря электродвигателя.
 На рис. 11, я приведены зависимости UЯ = ƒ(σ), где σ— длительность открытого состояния тиристоров ТП1. Поддержание стабильности заданной частоты вращения электродвигателя осуществляется жесткой отрицательной обратной связью от тахогенератора. Уменьшение частоты вращения с увеличением нагрузки на валу электродвигателя ведет к увеличению UВХ1 и соответственно увеличению UЯ, которое компенсирует дополнительное падение напряжения в сопротивлении якорной цепи IЯR поддерживая стабильность частоты вращения с требуемой точностью. Канал ослабления магнитного потока управляется напряжением, пропорциональным UЯ. Узел отсечки настраивается таким образом, что начало ослабления магнитного потока совпадает с моментом достижения номинального напряжения якоря электродвигателя.
На рис. 11, я приведены зависимости UЯ = ƒ(σ), где σ— длительность открытого состояния тиристоров ТП1. Поддержание стабильности заданной частоты вращения электродвигателя осуществляется жесткой отрицательной обратной связью от тахогенератора. Уменьшение частоты вращения с увеличением нагрузки на валу электродвигателя ведет к увеличению UВХ1 и соответственно увеличению UЯ, которое компенсирует дополнительное падение напряжения в сопротивлении якорной цепи IЯR поддерживая стабильность частоты вращения с требуемой точностью. Канал ослабления магнитного потока управляется напряжением, пропорциональным UЯ. Узел отсечки настраивается таким образом, что начало ослабления магнитного потока совпадает с моментом достижения номинального напряжения якоря электродвигателя.
Зависимости мощности Р, момента М, напряжения якорной цепи UЯ и цепи возбуждения UВ в функции частоты вращения при номинальном токе якоря приведены на рис. 11, б.
Тиристорный преобразователь ТП1, регулирующий напряжение якоря, выполнен по трехфазной мостовой полууправляемой схеме с разрядным вентилем, а преобразователь ТП2— по однофазной схеме.
Электропривод ЭТЗ с электродвигателем 2ПФ160Г, мощностью 11 кВт, с номинальным напряжением 220 В, номинальной частотой вращения 1500 об/мин. Исполнение электродвигателя М-101. Электропривод обеспечивает регулирование частоты вращения электродвигателя в диапазоне 600—3300 об/мин. Кроме того, возможно обеспечение ползучей скорости 25 об/мин. Электропривод используют в качестве привода механизма главного движения, например, зубофрезерного станка МА70Ф4.
 Схема подключения электропривода ЭТЗ к системе электроавтоматики станка, а также схема блока, обеспечивающего изменение направления вращения электродвигателя главного движения, приведена па рис. 12.
Схема подключения электропривода ЭТЗ к системе электроавтоматики станка, а также схема блока, обеспечивающего изменение направления вращения электродвигателя главного движения, приведена па рис. 12.
Преобразователь электропривода ЭТЗ подключается к сети через автоматический выключатель Q. Сигнал обратной связи, пропорциональный фактической частоте вращения, — однополярный независимо от направления вращения электродвигателя. Сигнал задания соответствует требуемой частоте вращения и определяется включением одного из реле К11—К25 или реле ползучей скорости К10. В схеме электроавтоматики станка реле К9 определяет наладочный режим работы, а реле К8 определяет режим работы по программе.
Пусковая команда подается срабатыванием реле КМОЗ или КМ04 при работе по программе или нажатием кнопки Кн1 в наладочном режиме. Команда на останов привода подается срабатыванием реле КМ05 при работе по программе или отключением кнопки Кн2 при работе в режиме наладки. При работе стайка по программе направление вращения определяется срабатыванием одного из реле КМОЗ (по часовой стрелке) или КМ04 (против часовой стрелки), а при работе в наладке направление вращения определяется положением переключателя ВВ—ВН.
Пуск привода происходит следующим образом:
- выбирается направление вращения электродвигателя, включается одно из реле К2 или КЗ (например, К2), которое, в свою очередь, включает реле К4 и отключает реле К5;
- реле К4 обеспечивает подачу управляющих импульсов на тиристоры V1 и VЗ, что определяет направление тока, протекающего по обмотке возбуждения ОВМ электродвигателя;
- при включении реле К1 включается пусковое реле в электроприводе, и происходит разгон электродвигателя в направлении, определенном направлением тока в обмотке возбуждения электродвигателя до частоты вращения, определяемой напряжением задания.
Изменение направления вращения электродвигателя происходит следующим образом: реле К2 отключается и выключает реле К3; через контакты реле КЗ и размыкающие контакты реле К6 включается реле К5, которое отключает пусковое реле в электроприводе, и происходит режим динамического торможения; во время торможения реле К4 остается включенным через реле контроля ползучей скорости К7; при останове электродвигателя отключается реле К4 и включается реле К6, которое обеспечивает подачу управляющих импульсов на тиристоры V2 и V4, что изменяет направление тока в обмотке возбуждения электродвигателя на противоположное, реле К5 отключается, и происходит включение пускового реле в электроприводе.
 Тиристорный преобразователь электропривода ЭТЗ выполнен в виде рамы жесткой конструкции. Элементы систем формирования отпирающих импульсов тиристоров, усилительной, управляющей, сигнализирующей и ограничивающей частей схемы смонтированы на двух печатных платах из фольгированного стеклотекстолита, которые устанавливаются в специальных пазах и включаются в схему через разъемы. Каждая плата на передней части имеет контрольные гнезда для включения контрольной и измерительной аппаратуры для определения правильности работы блока. Кроме того, на передней части располагаются все регулирующие элементы для настройки режимов работы электропривода и сигнальная лампа, сигнализирующая о правильности включения блока в сеть.
Тиристорный преобразователь электропривода ЭТЗ выполнен в виде рамы жесткой конструкции. Элементы систем формирования отпирающих импульсов тиристоров, усилительной, управляющей, сигнализирующей и ограничивающей частей схемы смонтированы на двух печатных платах из фольгированного стеклотекстолита, которые устанавливаются в специальных пазах и включаются в схему через разъемы. Каждая плата на передней части имеет контрольные гнезда для включения контрольной и измерительной аппаратуры для определения правильности работы блока. Кроме того, на передней части располагаются все регулирующие элементы для настройки режимов работы электропривода и сигнальная лампа, сигнализирующая о правильности включения блока в сеть.
Преобразователь электропривода ЭТЗ мощностью до 10 кВт имеет следующие габаритные размеры: длина 440 мм; ширина 265 н высота 350 мм, масса преобразователя 25 кг. Подключение преобразователя к сети, электродвигателю и внешней схеме управления осуществляется через штепсельный разъем, что упрощает монтаж электропривода. Преобразователь мощностью до 22 кВт имеет следующие габаритные размеры: длина 550, ширина 300, и высота 350 мм, масса преобразователя 30 кг. В этом преобразователе монтаж силовых цепей осуществляется медными шинами. В электроприводах применены электроизоляционные материалы класса нагревостойкости В. Все детали электропривода, выполненные из черных металлов и меди, покрыты антикоррозийным покрытием.
Элементы настройки электропривода, а также расположение контрольных гнезд на блоках управления БУ1 и БУ2 приведены на рис. 13.
Подключив измерительные приборы (табл. 2), можно провести наладку электропривода согласно карте наладки (табл. 3). В электропривод может быть встроен блок бесконтактного динамического торможения, обеспечивающий эффективное торможение при подаче команды «Стоп». Блок динамического торможения представляет собой последовательно включенные тормозной резистор и тиристор. Блок подключается параллельно якорю электродвигателя, а управляющий электрод тиристора подключен к точке 95. При подаче команды «Стоп» реле К1 отключается, и через размыкающие контакты на тиристор блока динамического торможения подаются импульсы, формируемые блоком БУ2.

Одной из модификаций блока торможения является блок динамического подтормаживания, обеспечивающий включение тормозного тиристора при снижении задающего сигнала и автоматическое включение режима торможения при достижении электродвигателем заданной пониженной частоты вращения. Силовая часть блока подтормаживания аналогична блоку динамического торможения. Формирователь импульсов тормозного тиристора управляется положительным сигналом выхода усилителя якорного канала.

Отрицательный сигнал выхода усилителя соответствует двигательному режиму электропривода и формирует управляющие импульсы на тиристорах якорного преобразователя. Положительный сигнал выхода усилителя (имеет место при превышении сигнала обратной связи задающего напряжения) соответствует тормозному режиму и обеспечивает формирование управляющего импульса на тормозном тиристоре. Отключение тормозного тиристора происходит автоматически при отсутствии управляющего импульса и нулевом анодном напряжении на тиристоре.
Реверсивные по возбуждению электроприводы серии ЭТДР. Электроприводы комплектные с тиристорными преобразователями серии ЭТДР предназначены для механизмов главного движения металлорежущих станков. В электроприводе мощность электродвигателя 1,5—30 кВт, номинальное напряжение 110, 220 В, диапазон регулирования частоты вращения изменением напряжения обмотки возбуждения (зависит от характеристики электродвигателя) до 10; минимальная частота вращения электродвигателя nMIN = 3 об/мин. Электроприводы должны обеспечивать четкую и надежную работу от трехфазной сети переменного тока 380 В частотой от 49 до 60 Гц при изменении напряжения сети на ±10 % от номинального. Реверс электропривода осуществляется изменением полярности напряжения обмотки возбуждения электродвигателя. Электропривод предназначен для работы в стандартных условиях окружающей среды.
Блок-схема электропривода ЭТДР приведена на рис. 14. Электропривод состоит из следующих узлов:
- тиристорного преобразователя для питания цепи якоря электродвигателя, тиристорного преобразователя для питания цепи обмотки возбуждения электродвигателя;
- тиристорного реверсора цепи питания обмотки возбуждения, электродвигателя, блока питания БП, усилителя У1 и блока формирования импульсов БФИ1 в канале управления якорем, усилителя У2 и блока формирования импульсов БФН2 в канале управления обмоткой возбуждения, блока управления режимом реверса БУР.
Структурно электропривод выполнен как двухконтурная система подчиненного регулирования, имеющая регулятор частоты вращения и регулятор тока. Ослабление магнитного потока осуществляется по зависимому принципу функции напряжения якоря. В электросхемах усилителей и формирователей электропривода применена элементная база на интегральных логических элементах и операционных усилителях.
 Электропривод ЭТДР имеет защиту от коротких замыканий по силовой якорной цепи с помощью плавких предохранителей F1, F2, FЗ. Защита от коротких замыканий в преобразователе, питающем обмотку возбуждения, осуществляется автоматическими выключателями Q2, Q3. Ограничение тока короткого замыкания в якорной цепи осуществляется анодными реакторами, а в цепи обмотки возбуждения — внутренним сопротивлением Т1.
Электропривод ЭТДР имеет защиту от коротких замыканий по силовой якорной цепи с помощью плавких предохранителей F1, F2, FЗ. Защита от коротких замыканий в преобразователе, питающем обмотку возбуждения, осуществляется автоматическими выключателями Q2, Q3. Ограничение тока короткого замыкания в якорной цепи осуществляется анодными реакторами, а в цепи обмотки возбуждения — внутренним сопротивлением Т1.
Электросхема подключения электропривода ЭТДР к системе электроавтоматики токарного станка 1725МФЗ приведена на рис. 15. Система управления электроприводом подключена к сети через автоматический выключатель Q2. К этому же выключателю присоединен электродвигатель вентилятора ВМ и первичная обмотка силового трансформатора Т регулятора возбуждения.
Силовая схема якорного преобразователя подключается к сети через контактор К27, автоматический выключатель Q1 и анодные воздушные реакторы. В цепи якоря электродвигателя включен амперметр А с наружным шунтом для контроля нагрузки главного привода. Параллельно тахогенератору через выпрямительный мост включено реле К34, сигнализирующее о достижении ползучей скорости, а также стрелочный прибор mV, показывающий величину фактической частоты вращения шпинделя. Так как прибор показывает частоту вращения шпинделя, а измеряет сигнал, пропорциональный частоте вращения электродвигателя, в зависимости от работы в первом или во втором механическом диапазоне включается соответственно реле К28 или К29.
От системы электроавтоматики станка к приводу подаются следующие команды: пуск привода КЗ0 (замыкание контактов 9—10), «Стоп привода» (замыкание контактов 1—10), направление вращения привода — К31 или К32, задание частоты вращения К1—К26, в том числе и ползучей скорости К0. От привода в систему автоматики замыканием контактов 6—7 подается команда о достижении электродвигателем заданной частоты вращения. Команда «Пуск привода» является предварительной: она дает разрешение на формирование выходных импульсов управления тиристорами якорного преобразователя. Команда «Стоп привода» подается только после электрического торможения и достижения электродвигателем ползучей скорости (реле К34). Эта команда снимает выходные импульсы управления тиристорами якорного преобразователя.
 Система электроавтоматики станка подключается к электроприводу через разъем X. В случае необходимости электропривод может управляться автономно от блока наладки БН, подключае мого к электроприводу через разъем X. В блоке наладки имеется переключатель режимов «Пуск» П, «Стоп» С, переключатель направления вращения привода «Вперед» В, «Назад» Н и регулятор частоты вращения (резистор К27 — на схеме не показан).
Система электроавтоматики станка подключается к электроприводу через разъем X. В случае необходимости электропривод может управляться автономно от блока наладки БН, подключае мого к электроприводу через разъем X. В блоке наладки имеется переключатель режимов «Пуск» П, «Стоп» С, переключатель направления вращения привода «Вперед» В, «Назад» Н и регулятор частоты вращения (резистор К27 — на схеме не показан).
Конструктивно преобразователь электропривода ЭТДР выполнен в виде двух стандартных кассет, одна из которых содержит силовую электросхему тиристорного преобразователя якоря электродвигателя, а другая — электросхему управления электроприводом и силовую электросхему тиристорного реверсивного преобразователя цепи обмотки возбуждения. Все элементы системы управления смонтированы на печатных платах, соединенных с преобразователем через разъемы.
Применение нереверсивного бестрансформаторного якорного преобразователя, современной элементной базы с высокой степенью интеграции в системе управления, дублирование и взаимные блокировки наиболее ответственных узлов привода, применение системы подчиненного регулирования в структуре электропривода позволили создать компактный и надежный электропривод, который обладает высококачественными статическими и динамическими характеристиками.
Габаритные размеры блока тиристорного преобразователя; 480x200x270 мм; блока управления: 480х200х150 мм.
Электропривод серии ЭТДР применяется в качестве электропривода главного движения токарного станка 1725МФЗ. Токарный патронно-центровой полуавтомат 1725МФЗ с ЧПУ и инструментальным магазином предназначен для комплексной токарной обработки деталей типа валов, гильз, дисков и других, обрабатываемых в центрах, в патроне или на оправке. Станок управляется от контурной системы ЧПУ 1Н22-2М. В комплект электропривода серии ЭТДР входит электродвигатель постоянного тока 2ПФ200, 1500/3300 об/мин, 30 кВт, 220 В исполнение М101. Обратная связь по частоте вращения осуществляется от тахогенератора ТМГ-ЗОП, связанного с валом электродвигателя через ременную передачу.
 Кинематическая схема электромеханического привода главного движения токарного станка 1725МФЗ приведена на рис. 16, а. Вал электродвигателя М через клиноременную передачу соединен со шкивом шпиндельной бабки. Шпиндельная бабка содержит четырехваловую (I—IV) коробку скоростей. С помощью сменных зубчатых колес выбирается рабочий диапазон изменения частоты вращения шпинделя (25—1600, 31—2000, 45—2800 об/мин). Переключение перебора зубчатых колес осуществляется автоматически с помощью гидроцилиндра 2. Вал шпинделя 3 через дополнительное зубчатое колесо соединен с датчиком режима резьбо-нарезания 1. Датчик угла поворота на шпинделе позволяет реализовать режим резьбонарезания. Система электрического вала между приводами главного движения и подачи осуществляется через управляющую машину. Например, на токарных станках с ЧПУ средних размеров, оснащенных приводом ЭТДР, нарезается метрическая резьба М60 с шагом 2 мм, причем накопленная погрешность не превышает 0,01 мм (на длине заготовки 200 мм). График частот вращения представлен на рис. 16, б. Блок зубчатых колес шпиндельной бабки может находиться в одном из двух положений, обеспечивая два диапазона частот вращения шпинделя: от 25 до 500 и от 560 до 1600 об/мин. Электродвигатель привода главного движения обеспечивает регулирование частоты вращения на шпинделе в диапазоне 2,2 с постоянством предельной мощности и в диапазоне 50 с постоянством предельного момента.
Кинематическая схема электромеханического привода главного движения токарного станка 1725МФЗ приведена на рис. 16, а. Вал электродвигателя М через клиноременную передачу соединен со шкивом шпиндельной бабки. Шпиндельная бабка содержит четырехваловую (I—IV) коробку скоростей. С помощью сменных зубчатых колес выбирается рабочий диапазон изменения частоты вращения шпинделя (25—1600, 31—2000, 45—2800 об/мин). Переключение перебора зубчатых колес осуществляется автоматически с помощью гидроцилиндра 2. Вал шпинделя 3 через дополнительное зубчатое колесо соединен с датчиком режима резьбо-нарезания 1. Датчик угла поворота на шпинделе позволяет реализовать режим резьбонарезания. Система электрического вала между приводами главного движения и подачи осуществляется через управляющую машину. Например, на токарных станках с ЧПУ средних размеров, оснащенных приводом ЭТДР, нарезается метрическая резьба М60 с шагом 2 мм, причем накопленная погрешность не превышает 0,01 мм (на длине заготовки 200 мм). График частот вращения представлен на рис. 16, б. Блок зубчатых колес шпиндельной бабки может находиться в одном из двух положений, обеспечивая два диапазона частот вращения шпинделя: от 25 до 500 и от 560 до 1600 об/мин. Электродвигатель привода главного движения обеспечивает регулирование частоты вращения на шпинделе в диапазоне 2,2 с постоянством предельной мощности и в диапазоне 50 с постоянством предельного момента.