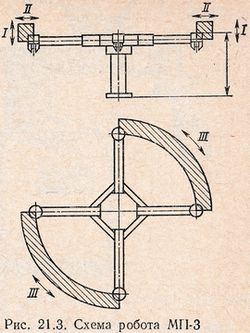
Пневматический робот МП-3 (рис. 21.3) предназначен для обслуживания окрасочных автоматов, прессового и металлорежущего оборудования, а также может быть использован при автоматизации сборочных работ.
Техническая характеристика робота
Число степеней подвижности: 3
Переносные степени подвижности:
- подъем (движение I), мм: 125
- скорость подъема, мм/с: 100
- поворот (движение III), °: 90
- скорость поворота, °/с: 90
- выдвижение (движение II) схватов, мм: 100
- скорость выдвижения схватов, мм/с: 100
Число манипуляторов: 4
Грузоподъемность одного манипулятора, кг: 0,5
Тип управляющего устройства: Цикловое
Число кадров в цикле: 40
Число входов от внешнего оборудования: 14
Число выходов на внешнее оборудование: 7
Масса, кг: 40
Характерные особенности робота МП-3 — наличие четырех манипуляторов с попарно независимым управлением приводами выдвижения захватов и то, что его конструкция выполнена по модульному принципу.
У него имеются модули подъема, поворота и выдвижения охвата с соответствующими механизмами. Независимое попарное выдвижение схватов обеспечивает преимущественное его применение для обслуживания одновременно двух единиц оборудования. В этом случае два охвата забирают заготовки от магазинов, а другие два снимают обработанные детали со станков. После поворота на 90° два схвата возвращают обработанные изделия в магазины, а другие два устанавливают заготовки на станки для обработки.
Устройства подъема, поворота и выдвижения схвата снабжены пневмоцилиндрами для осуществления соответствующих движений. Схват имеет пневмокамеру одностороннего действия. Для исключения выпадания заготовок при падении давления в магистрали сжатого воздуха зажим осуществляется пружиной, а разжим — за счет энергии сжатого воздуха.