На основании 1 (рис. 21.7) закреплен коробчатый корпус, внутри которого расположены механизмы подъема руки и поворота ее вокруг вертикальной оси. Поворот осуществляется от двигателя-редуктора 3 через выходное зубчатое колесо 5, находящееся в зацеплении с колесом 4, которое жестко закреплено на трубе 6, соединенной с барабаном 7. На наружной поверхности барабана выполнены Т-образные пазы с флажками, входящими при повороте в пазы бесконтактных переключателей 8, обеспечивающих команду на останов. Точная доводка до позиции обеспечивается штоком пневмоцилиндра 9, воздействующим на жесткий упор, закрепленный на барабане. Механизм подъема состоит из электродвигателя 18, который через червячную пару 19 и зубчатое колесо 20 связан с рейкой, выполненной заодно с трубой 6.
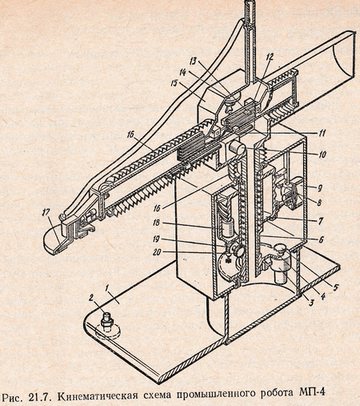
Промежуточных позиций механизм подъема не имеет и работает от упора до упора. Рука робота крепится к трубе 6. В продольном направлении рука, расположенная в защитном кожухе 16, перемещается от электродвигателя 10 через реечную передачу 11. На корпусе руки закреплена накладка 12 с Т-образными пазами, в которых устанавливают передвижные флажки 13 для грубой остановки перемещения с помощью бесконтактных переключателей. Точная остановка осуществляется пневмоцилиндром 14, вилка которого входит в контакт с роликовыми упорами, установленными на накладке 12.
Захватное устройство выполнено в виде вакуумного присоса 17, к которому подводится принудительное разрежение. Положение робота относительно оборудования выверяется четырьмя винтами 2. Цифрой 15 обозначена головка робота. Робот оснащен цикловой системой программного управления.