Схемы бесконтактного логического управления электроавтоматическими устройствами, являются более надежными, чем контактные электрические схемы, и особенно важно то, что их функции могут быть реализованы логическим управлением с помощью программируемых микроконтроллеров. Это дает возможность реализовать управление объектом с гибкой структурой посредством введения управляющих программ. Для программирования работы электроавтоматических устройств станков, которые управляются программируемыми микроконтроллерами, применяют программные панели с клавиатурой входного языка программирования и средствами контроля вводимой информации.
Для программирования при отсутствии транслирующих программ ведется подготовительная работа: программа управления электроавтоматическими устройствами кодируется на языке программной панели. При входном языке с символикой релейно-контактных схем составляют релейно-контактную схему управления электроавтоматикой станка (рис. 52, а), которую называют исходной. На основании исходной схемы составляют схему, подготовленную для программирования. На данной схеме все элементы обозначаются в символах программирования, например, 0ХХХ — входные адреса, 1ХХХ — цепи исполнительных элементов, 2ХХХ — исполнительные реле, ЗХХХ — промежуточные реле, 4ХХХ—6ХХХ, 7ХХХ — входные цепи безоптронной развязки, причем с такими рекомбинациями и числом аргументов, которые соответствуют функциональным возможностям логического микропроцессора при обработке входных аргументов и аргументов обратных связей (фотография состояния объекта).
Схема, подготовленная для программирования (рис. 52, б), вводится в память с помощью программной панели (рис. 52, з), имеющей следующие операционные клавиши: АВСD — клавиши для задания аргументов, Р — клавиша состояния аргументов, четыре клавиши, имитирующие замыкающиеся и размыкающиеся контакты последовательного и параллельного включения, И — индикатор для контроля вводимой информации.
Таким образом, данной программирующей панелью может быть реализована цепь (строка), в которой исполнительный элемент (функция строки) может иметь не более четырех выполняемых условий (аргументов). Следовательно, если какое-то реле в цепи включается при выполнении более четырех условий (смотри исходную схему рис. 52, а), то вводится дополнительное реле, управляемое согласно четырем новым условиям. Схема, реализующая данные условия, представлена на рис. 52. б.
За последнее время интенсивно ведутся работы в разных направлениях по автоматизации программирования, подготовки и ввода управляющих программ в ПЛМК, в том числе ведутся работы в направлении создания более формальных и лаконичных символических языков, описывающих схемы управления и алгоритм их работы. Так, например, операторный язык позволяет описать релейно-контактную или бесконтактную схему управления с помощью операторов (инструкций). Тогда УП, т. е. алгоритм управления электроавтоматическими устройствами, будет представлен в виде структурной схемы, что дает возможность наглядно и лаконично представлять алгоритмы управления. На основании такой структурной схемы составляется управляющая программа управления электроавтоматическими устройствами на языке программирования.
Операторный язык имеет стандартные операторы. На рис. 52, в представлена стандартная инструкция, в которой элементарные технологические операции или порядок включения исполнительных органов обозначены оператором S, порядок следования исполнения — естественный (исполнение в порядке записи).
На рис. 52, а приведена условная инструкция с одним переходом, в которой оператор В является оператором проверки условия, а оператор S — исполнения действия. Если условие «В» выполнено, то переход происходит к действию S, если условие не выполнено, то переход выполняется к следующему действию (К).
На рис. 52, д приведена инструкция двойного условного перехода. Если выполнилось условие «В», то переход происходит к действию S1 если оно не выполнилось, то переход происходит к действию S2, т. е. разрешение ситуации осуществляется альтернативно.
На рис. 52, е приведена циклическая инструкция с охватом определенного количества действий S, где повторение исполнения охваченных действий происходит при невыполнении условия В, при выполнении условия В осуществляется выход из цикла к дальнейшим действиям программы.
На рис. 52, ж показана элементарная структурная схема управления электромагнитной муфтой ЭМ1 с помощью конечного выключателя В1. Состояния муфты обозначены символами («+» — включено, «—» — выключено).
Для придания языку универсальности и эффективности в его состав включены необходимые инструкции, которые по назначению разделяют на следующие группы:
- логические;
- арифметические;
- выдержки времени;
- счетных операций;
- операций переноса;
- условного перехода;
- безусловного перехода и нулевого шага.
Для программирования управляющих программ для электроавгоматических устройств широкое применение получил язык логических выражений, который непосредственно описывает алгоритм работы бесконтактной схемы управления. Электроавтоматические устройства, которые построены на базе логических элементов (бесконтактная управляющая логика), описываются с помощью логических функций, где алгоритм управления, реализующий управляющую программу, разбивается на элементарные логические выражения (строки). Данные выражения вводят для реализации как отдельные фрагменты управляющей программы, включающие тот или иной исполнительный элемент или орган, или делают проверку какого-то условия.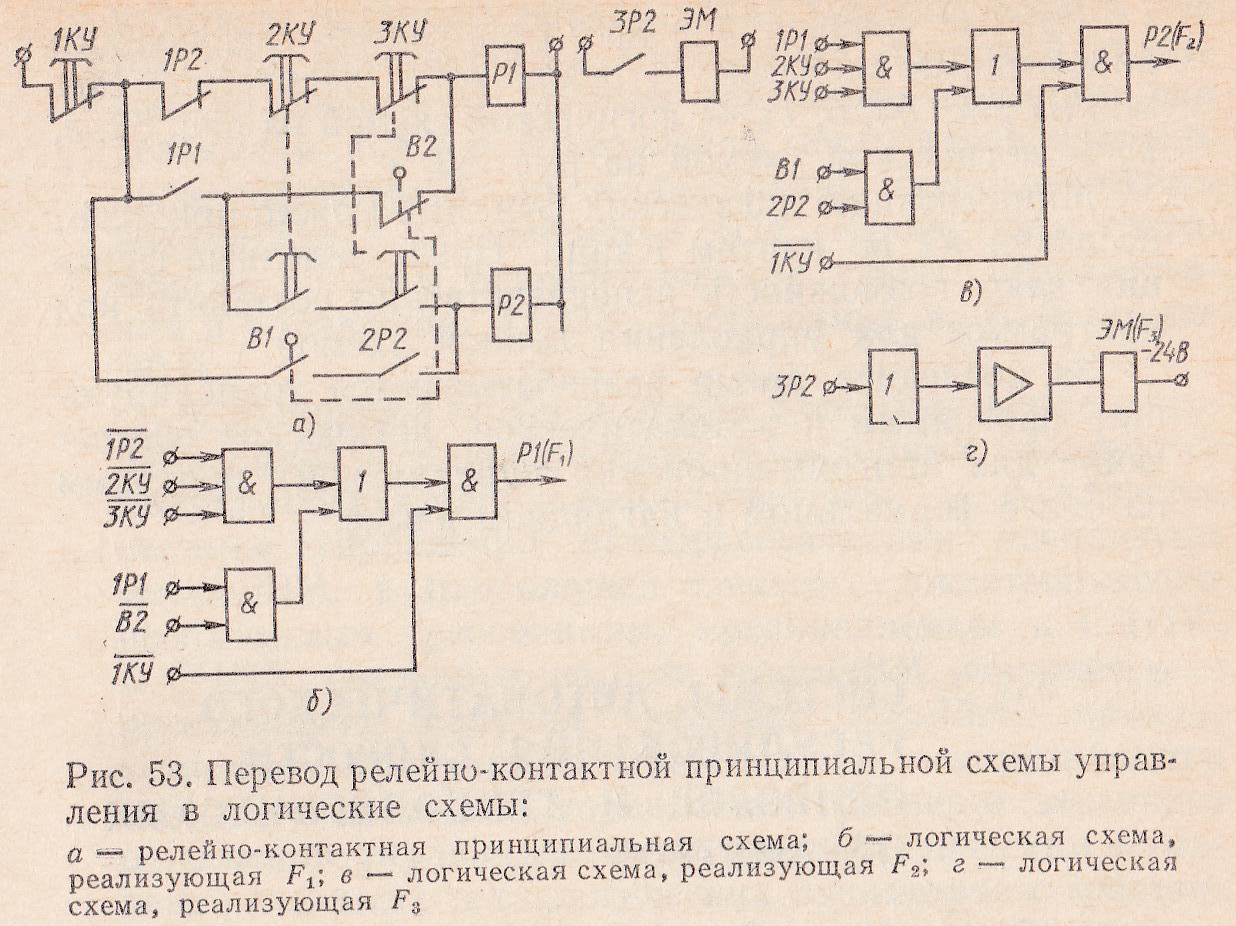
На рис. 53, а дана принципиальная схема релейноконтактного управления как исходная. Для ее описания с помощью логических выражений необходима разбивка схемы на элементы. Релейно-контактная схема работает по следующему алгоритму. В исходном положении включено промежуточное реле Р1, которое своим замыкающим контактом 1Р1 подготовляет схему для включения цикла с помощью пусковых кнопок 2КУ, ЗКУ. При нажатии кнопок 2КУ, ЗКУ — пуск цикла, включится реле Р2, которое в свою очередь контактом ЗР2 включает электромагнит ЭМ. При рабочем движении контакт В1 замкнется, поставив цепь на самопитание, а контакт В2 разомкнется, отключив Р1 (исходное состояние). При движении вперед по циклу рабочий орган посредством управляющего золотника с прямого хода переключается на обратный (движение в исходное состояние). При этом, когда отключается 1Р1, питание пусковых кнопок 2КУ, ЗКУ прекратится, следовательно, цикл продолжится независимо от положения кнопок, т. е. повторное действие кнопок вперед невозможно, так как они обесточены. По окончании цикла рабочий орган в исходном положении разомкнет В1 и замкнет В2, тем самым отключит Р2 и электромагнит, а закрытым контактом 1Р2 готовится цепь для повторения цикла. Аварийное прерывание действий можно осуществить кнопкой 1КУ. Представленную схему управления, обеспечивающую вышеуказанный алгоритм, можно выразить в виде логических уравнений, реализующих включение соответствующих аппаратов схемы управления:![]()
Данные уравнения можно реализовать следующими логическими схемами: F1 реализуется логической схемой на рис. 53, б, F2 — логической схемой на рис. 53, в, F3 — логической схемой на рис. 53, г.
Минимизацию логических функций можно провести, исследуя их по картам Карно. Представленные функции дают возможность непосредственно составить код программы для управления данной схемой.
За последнее время разрабатываются транслирующие программы и математическое, логическое обеспечение для программирования управляющих программ на более формальном и наглядном языке.