Принципы действия и конструкции захватных устройств различны и зависят от объекта манипулирования, включая его размеры, форму и физико-химические свойства. Захватные устройства можно классифицировать по следующим признакам:
- по способу захвата и удержания объекта;
- по наличию устройств очувствления.
По первому признаку захватные устройства делят на механические, вакуумные, электромагнитные и комбинированные; по второму признаку — на неочувствленные и очувствленные.
Механические захватные устройства состоят из приводного устройства, механизма зажима и захватывающих элементов (губок схвата). По виду используемого привода механические схваты подразделяют на электромеханические, пневматические и гидравлические, а по виду движения губок — на схваты с поступательным и поворотным движениями губок, осуществляемыми соответствующими механизмами зажима.
Вакуумные захватные устройства — это в основном вакуум-присосы, удерживающие предмет за счет разрежения воздуха, создаваемого между поверхностью предмета и вакуум-присосом.
Электромагнитные захватные устройства, основной частью которых являются электромагниты, используют для манипулирования с ферромагнитными предметами. Схват с электромеханическим приводом приведен на рис. 21.2, а. Плоскопараллельное движение губок 1 и 2 схвата осуществляется с помощью электродвигателя М, зубчатой передачи 4 и передачи винт-гайка 3.
У схвата, показанного на рис. 21.2, б, плоскопараллельное движение губок 1 и 2 обеспечивают параллелограммные механизмы 3, которые приводятся в движение от приводного вала 5 с помощью конической передачи 4. Для обеспечения легкосъем-ности схват связан с последним звеном 6 манипулятора специальным замком 7. Соединение фиксируется двумя рычажками 8, проходящими через пазы втулки 9 схвата и входящими своими концами в канавки звена 6. Рычажки подпружинены пружинами 10.
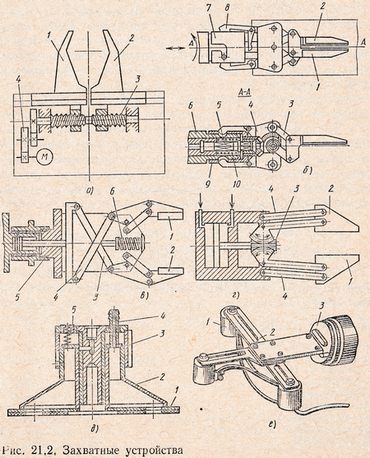
Схват с приводом от пневмоцилиндра одностороннего действия представлен на рис. 21.2, в. Губки 1 и 2 схвата через систему рычагов 3 и 4 приводятся в движение с помощью пневмоцилиндра 5, закрепленного на последнем звене манипулятора, и пружины 6.
У схвата с пневмоцилиндром двойного действия (рис. 21.2, г) приводное устройство губок 1 и 2 представляет собой сдвоенную реечную пару 3, связанную с параллелограммными механизмами 4, обеспечивающими плоскопараллельное перемещение губок,
Схват для взятия плоских деталей, выполненный в виде вакуум-присоса изображен на рис. 21.2, д. Разряжение между поверхностью заготовки и резиновой прокладкой 1, приклеенной к чашке 2, создается при отсосе воздуха через штуцер 4. Для компенсации погрешности позицианирования при опускании манипулятора чашка может перемещаться в вертикальном направлении в корпусе 3. Возврат в исходное положение осуществляется пружиной 5.
В электромагнитном схвате (рис. 21.2, е) три электромагнита 1 закреплены на крестообразном основании 2, которое крепится к звену 3. В основании звена видны пазы, используемые для установки электромагнитов на заданный размер заготовки.
На схватах промышленных роботов, если это необходимо по условиям технологического процесса, устанавливают чувствительные элементы, дающие информацию об объекте и внешней среде, в которой функционирует робот.