Асинхронные двухфазные электродвигатели в настоящее время являются наиболее распространёнными исполнительными двигателями переменного тока. Принципиальная схема двигателя схематично представлена на рис.1. Электродвигатель имеет две общие обмотки, расположенные в пазах статора. Обмотка 1 называется главной (обмоткой возбуждения) и постоянно находится под напряжением. На другую обмотку 2 (обмотка управления) напряжение через управляющий усилитель 3 подаётся лишь тогда, когда требуется привести вал 4 двигателя во вращение. От величины напряжения на обмотке управления зависит скорость вращения и механическая мощность, развиваемая электродвигателем.
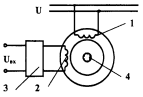
Рисунок 1.
Для создания вращающегося магнитного поля главная и управляющая обмотки сдвинуты относительно друг друга на 90°. Обе обмотки обычно выполняются с одинаковым количеством витков. Но в тех случаях, когда необходимо уменьшить потребляемую мощность на управление двигателем, число витков управляющей обмотки по сравнению с обмоткой возбуждения увеличивается в 2–3 раза.
Различают два вида исполнения двухфазных асинхронных двигателей: с короткозамкнутым ротором типа «беличья клетка» и полым немагнитным ротором.
Асинхронные двухфазные исполнительные двигатели с ротором типа «беличья клетка» имеют такую же конструкцию и принцип действия, как и трёхфазные асинхронные двигатели с аналогичным ротором. Современная технология позволяет изготовить такие двигатели с очень небольшим воздушным зазором 0,03 – 0,05 мм и высокими энергетическими показателями. Однако у таких двигателей большой момент инерции ротора. Технические характеристики некоторых асинхронных двигателей с ротором типа «беличьей клетки» приведены в табл.1.1.
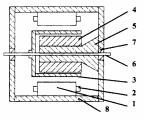
Рисунок 2.
Если ротор разделить на магнитопроводящую и электропроводящую части и первую сделать неподвижной, а вторую — в виде вращающегося полого цилиндра, получим асинхронный двухфазный двигатель с полым немагнитным ротором (АДП).
Конструктивное устройство такого двигателя схематично показано на рис.2. Магнитопровод внешнего статора 1, закрепленный в корпусе 8,набирают из листов электротехнической стали. В пазах статора располагаются две обмотки (возбуждения и управления), сдвинутые на 90°.
Таблица 1.1.
|
Тип двигателя |
f, Гц |
Uв, В |
Uy, В |
nx.x., об/мин |
Тм, мс |
Мл/Мн |
Pн, Вт |
Масса, г |
|
ДКМО, 16 –12 ДКМО, 4 –12 ДКМ1 –12 ДКМ2, 5 –12 ДКМ6 –12 ДКМ16 –12 ДКМ25 –12 ДКМ100 –12 АД –20 АД –25 АД –32 АД –40 АД –50 АДИ –20 АДИ –25 АДИ –32 АДИ –50 2АСМ –50 2АСМ –100 2АСМ –200 2АСМ –400 РД –0911 ДКИ –1,6–ЗАТ ДКИ –4,0–ЗАТ ДКИР –0,4 –0ТВ ДКИР –0,4 –50ТВ |
400 400 400 400 400 400 400 400 400 400 400 400 400 400 400 400 400 50 50 50 50 50 50 50 50 50 |
36 36 115 115 115 115 115 115 24 40 40 40 40 24 40 40 40 20 110 110 110 127 220 220 127 127 |
36 36 36 36 36 80 80 80 24 24 24/40 24/40 24/40 24 24 24 24 20 110 110 110 24 127 127 24 24 |
4000 5000 5000 5500 5500 5000 6100 8000 6000 6500 7000 8000 5000 – – – – 1300′ 1280′ 1180′ 1120′ 750′ 1800′ 1800′ – – |
15 20 25 30 40 50 60 350 13 30 20 25 22 13 30 20 25 45 45 – 88 20 10 12 – – |
1,4 1,36 1,8 1,61 1,48 1,5 1,4 1,17 – – – – – – – – – 4,5 1,0 2,8 2,0 1,69 1,84 1,7 – – |
0,16 0,4 1,0 2,5 6 16 25 100 0,3 0,9 1,7 2,5 3,5 0,3 0,8 1,7 2,2 0,67 1,32 2,4 4,6 1,28 2,4 5,0 0,4 0.4 |
40 80 130 250 470 880 – 4000 30 74 130 240 450 – – – – 720 1115 1250 1200 580 500 850 300 300 |
|
Примечание: n’ — номинальная частота вращения ротора. |
||||||||
В воздушном зазоре между внешним и внутренним статором находится полый ротор 3, выполненный в виде тонкостенного стакана из немагнитного материала, чаще всего из сплава алюминия и бронзы. Дно ротора жёстко укрепляют на валу 6, который вращается в подшипниках 7.
Принцип действия двигателя с полым немагнитным ротором состоит в следующем. Переменный ток, протекая по обмоткам статора, создаёт вращающееся магнитное поле, которое, пересекая полый ротор, наводит в нём вихревые токи. В результате взаимодействия этих токов с вращающимся магнитным полем возникает момент, который, действуя на ротор, увлекает его в сторону поля.
Однако ротор имеет очень малую массу и, следовательно, незначительный момент инерции, что положительно сказывается на быстродействии двигателя.
Однако исполнительные двигатели такого типа имеют низкие коэффициенты мощности и к.п.д., а также менее надёжны при высоких температурах и вибрациях.
Технические характеристики некоторых двигателей с полым ротором приведены в таблице 1.2.
Таблица 1.2
Технические данные двигателей с полым ротором
|
Тип ИД |
f, кГц |
UВ, в |
Uy, В |
Тм, мс |
, % |
Мкр/Мн |
Рн, Вт |
nн, об/мин |
|
АДП — 023А АДП — 023 АДП – 123 АДП – 262 АДП – 362 ЭМ-1М ЭМ-2М ЭМ-4М ЭМ-8М ДИД — 1ТА ДИД — 2ТА ДИД – ЭТА ДИД — 5ТА И6762 — 037 И6762 – 038 И6762 — 050 ИД-1 ИД-1Д ДАД2-350/50 ДАД6-50/400 |
400 600 500 50 50 400 400 400 400 400 400 400 400 427 427 427 200 200 50 400 |
40 110 110 110 110 115 115 115 115 36 36 36 36 110 110 220 15 15 127 110 |
110 110 110 125 120 60 60 60 80 30 30 30 30 110 110 200 15 15 150 110 |
39 24 64 5 6 15 20 25 30 80 55 25 75 70 130 160 224 224 43 45 |
15 8 15 19,2 29 4,3 8,2 10,5 19 18 20 23 20 – – – – – – – |
1,15 1,67 1,5 1,8 1,8 1,75 2,0 1,84 1.6 1,95 1,89 1,8 1,84 3,1 2,2 4,3 1,59 1,59 1.8 2,0 |
4,0 2,1 4,6 9,6 19 1,18 2,9 4,4 9,0 1,0 2 3 5 2,7 5,6 2,3 1,48 1,48 350 5,0 |
– – 4000 1850 1950 2000 2000 200 2000 18000 16000 8000 6000 – – – – – – – |