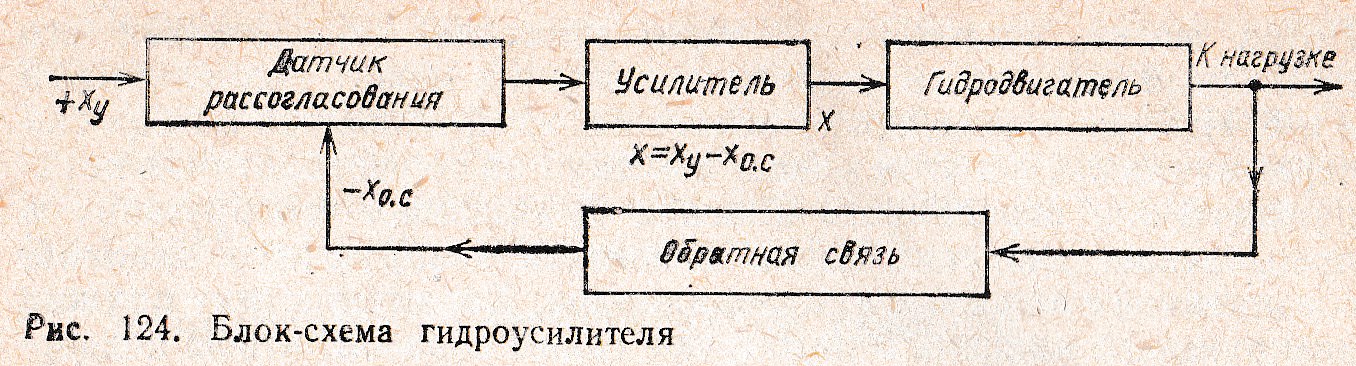
Следящие гидросистемы широко применяют в приводах станков с ЧПУ. В гидросистемы входит следящий гидропривод. В его состав входят гидроусилители (гидропередачи с обратной связью) (рис. 124). Выход такого гидроусилителя автоматически устраняет через обратную связь возникающее рассогласование между управляющим воздействием (входным сигналом) и ответным действием (выходным сигналом). Под входным сигналом хУ понимается любое намеренное воздействие (перемещение, скорость и прочие параметры), сообщаемые датчику рассогласования от задающего устройства, а под выходным сигналом х понимается воздействие, развиваемое исполнительным органом (гидродвигателем), с помощью которого осуществляется требуемое перемещение выходного звена. Выходная мощность гидроусилителей практически не ограничена, мощность входного сигнала может быть мала (0,5 Вт).
Для слежения обычно применяют отрицательную обратную связь, передающую выходной сигнал на вход (к управляющему элементу). Существуют различные виды обратных связей. В электрогидравлических сервомеханизмах широко применяется жесткая обратная связь выхода с входом по положению, которая обладает высокой точностью слежения и устойчивостью против колебаний.
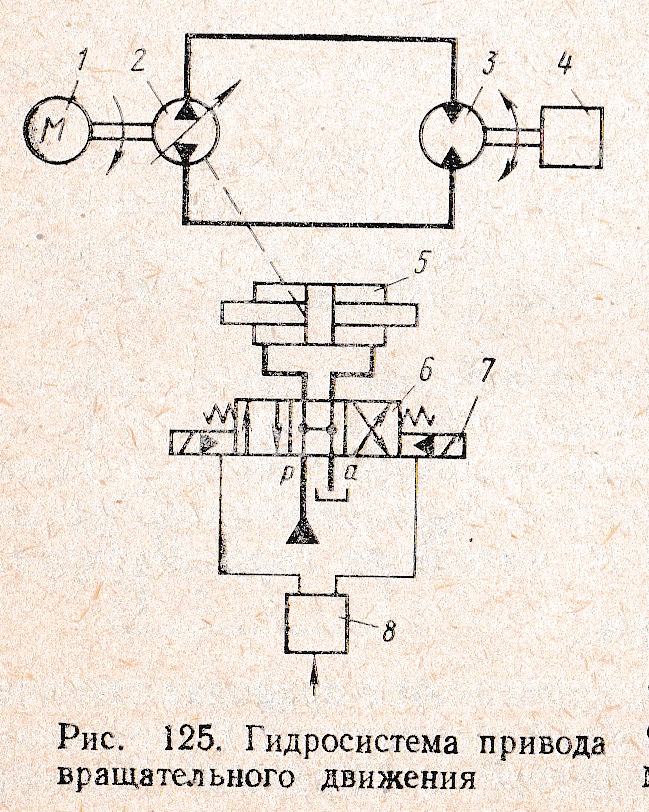
соединит линию нагнетания р с левой частью сервоцилиндра 5; правая часть будет соединена со сливом а. Сервоцилиндр механически связан с регулирующим органом насоса 2. Под действием рабочей жидкости сервоцилиндр повернет регулирующий орган насоса, выведя его из нейтрального положения, изменив его рабочий объем и подав рабочую жидкость в гидромотор 3. Гидромотор, вращаясь, переместит рабочий орган 4. В данной схеме образованы две регулирующие системы: гидрораспределитель 6 и сервоцилиндр 5, насос 2 и гидромотор 3. Гидрораспределитель в первой системе является управляющим звеном, а сервоцилиндр — усилительным. Управляющими звеньями в станках с ЧПУ называют электромеханические преобразователи (ЭМП), шаговые двигатели (ШД), управляющие золотники, сервоцилиндры.
Гидроусилителями называют усилительно-преобразовательные устройства, которые позволяют управлять большими мощностями. Они предназначены для управления насосами, гидромоторами, регулируемыми дросселями, гидроклапанами. В гидросистемах объемного регулирования станков с ЧПУ наибольшее распространение получили гидроусилители золотникового типа — золотник и сервоцилиндр и электрогидравлические усилители — электромеханический преобразователь, золотник. Гидроусилитель такого типа с обратными связями является маломощной гидравлической следящей системой дроссельного регулирования с входным сигналом в виде перемещения, получаемого от электромеханического преобразователя. А это приводит к усложнению структуры системы управления с ЧПУ, связанной с применением золотника и трудностями обеспечения устойчивости системы (явление гистерезиса), а появление зазоров в системе усилителя вызывает фазовые ошибки. Все это влияет на точность работы выходных звеньев гидросистемы.
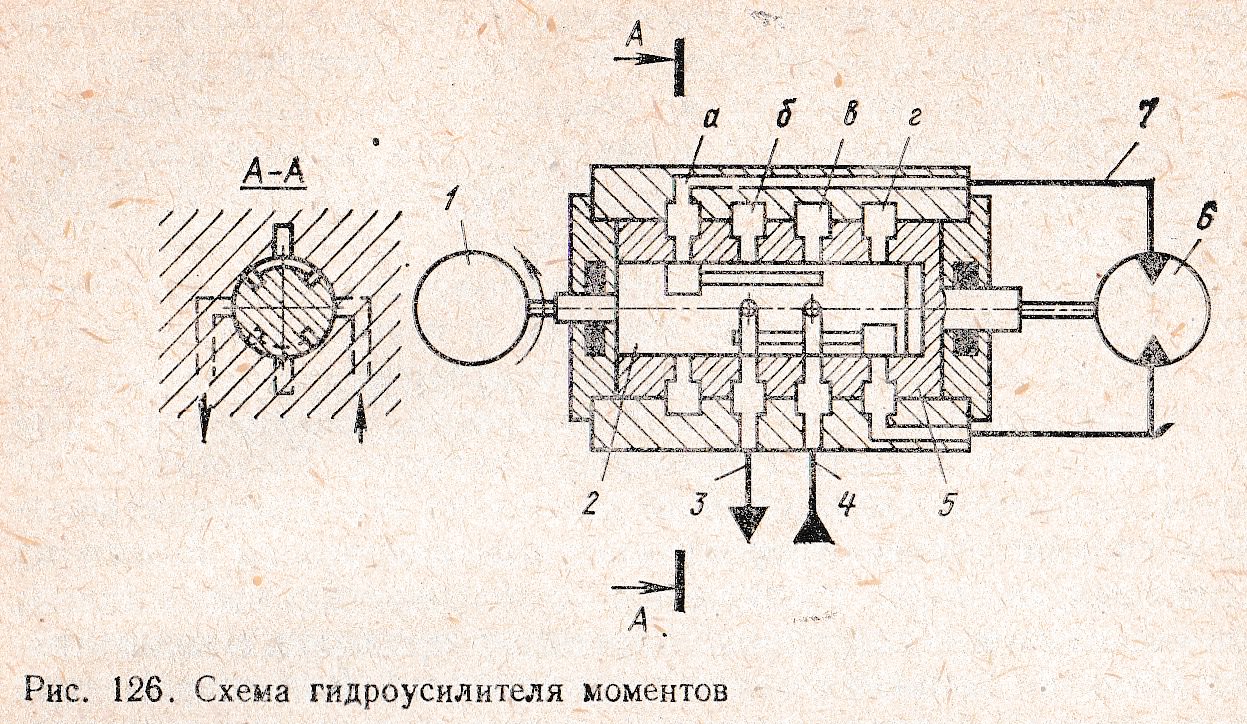
Другой разновидностью гидроусилителей, применяемых в станках с ЧПУ, является аксиально-плунжерный гидромотор, работающий с вращающимся золотником. Они образуют автономную следящую систему с жесткой отрицательной обратной связью по углу поворота выходного вала (рис. 126).
Масло от пластинчатого насоса, вращаемого асинхронным электродвигателем, подается через фильтр и обратный гидроклапан (на схеме не показаны) по трубопроводу 4 к гидроусилителю моментов, состоящему из управляющего золотника 2 и гидромотора 6. Выходной вал управляющего золотника 2 связан с шаговым двигателем 1 и вращается во втулке 5. Во втулке имеются два отверстия, выходящие в проточку в, соединенную с нагнетательной линией насоса трубопроводом 4, и два отверстия, выходящие в проточку б, соединенную с сливной линией трубопроводом 3. Отверстия во втулке 5, выходящие в проточки а и г через трубопроводы 7, соединены с рабочими полостями гидромотора 6. В золотнике имеются четыре фрезерованные канавки и четыре уплотняющих пояска. Когда золотник 2 находится в среднем положении, его уплотняющие пояски перекрывают отверстия, выходящие в канавки б и в и обе полости гидромотора заперты. Рабочий орган станка не двигается. При повороте золотника 2 от среднего положения в ту или другую сторону шаговым двигателем 1 одна из полостей гидромотора соединяется с нагнетательной линией, а вторая со сливом в гидробак. Гидромотор приходит в движение. Втулка 5 жестко связана с валом гидромотора 6. Вал гидромотора вместе с втулкой 5 поворачивается до тех пор, пока отверстия, входящие в проточки бив втулки 5 не будут перекрыты поясками золотника 2 (жесткая обратная связь уменьшает рассогласование в системе). Угол поворота золотника 2 соответствует углу поворота шагового двигателя; следовательно, гидромотор точно отрабатывает углы поворота шагового двигателя 1.
Крутящий момент гидромотора пропорционален перепаду давления в гидросистеме между обеими его полостями.
Гидроусилители имеют ряд преимуществ по сравнению с усилителями другого типа: меньшую инерционность, лучшие динамические характеристики, малую массу и габариты, удобство преобразования энергии потока жидкости в механическую энергию, возможность управлять большими мощностями. Их недостатки:
На устойчивость и точность гидроусилителей кроме точности изготовления механических элементов системы влияют сжимаемость и утечки масла, деформации трубопроводов, трение и люфты в соединениях.
Для управления работой механизмов промышленных роботов, станков, прессов и других машин по программе, поступающей на привод в виде электрических сигналов от задающего устройства, предназначен электрогидравлический следящий привод. Привод состоит из гидроцилиндра дифференциального типа; блока датчиков, в который входят датчики обратной связи и лентопротяжный механизме компенсатором зазоров; гидрозамка и дросселирующего гидрораспределителя с электроуправлением. В зависимости от типоразмера привод может иметь различные характеристики.
Если основа оригинала (карты пли плана) прозрачна, то копию можно снять при помощи стола со…
Определение координат точки. Пусть точка А (рис. 32) находится в квадрате, абсциссы и ординаты вершин…
Рельефом местности называется совокупность неровностей физической поверхности земли. В зависимости от характера рельефа местность делят…
Для обозначения на планах и картах различных предметов местности, применяются специально разработанные условные знаки. Для обличения…
В инженерной геодезии чаще всего пользуются топографическими картами. Их составляют в масштабах 1:10000, 1:25000, 1:50000…
{kind=link}
{kind=link}
{kind=link}