Станина 1 (рис. 1) имеет внизу форму плиты, служащей основанием станка, а вверху — форму стойки. Спереди, па верхней части стайка имеется плоскость, в которой крепится основание 5, а к нему снизу монтируется шевинговальная головка 4. Ниже, также впереди станины, расположены вертикальные направляющие, к которым прижимается консоль 2 с механизмом продольной и радиальной подач. На горизонтальных направляющих консоли установлен стол 3, состоящий из салазок и укрепленной на них верхней части. Стол может перемещаться по направляющим консоли в обе стороны.
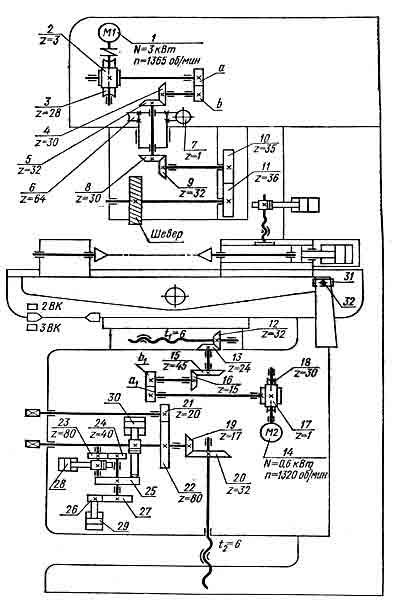
Кинематическая схема станка состоит из трех самостоятельных кинематических цепей (рис. 2): вращения шевера, продольной подачи стола и радиальной подачи консоли со столом.
Цепь вращения шевера заимствуется от электродвигателя 1 через червячную передачу 2-3, сменные колеса а-b, конические пары 4 — 5, 8 — 9 цилиндрические колеса 10 — 11.
Цепь продольной подачи стола начинается от электродвигателя 14 через червячную пару 17 — 18, сменные колеса a1 -b1, конические пары 16-15 и 13-12 на винт tx, который сообщает поступательное движение столу.
Цепь радиальной подачи осуществляется от гидроцилиндра 28 через реечную пару на цилиндрические колеса 23-24; вращение получает валик, на котором закреплены кулак радиальных подач 25 и барабан управления 27. Угол поворота кулака 25 ограничивается винтами-упорами, расположенными в шахматном порядке и опирающимися на собачку 26, которая перебрасывается гидроцилиндром 29. Кулак имеет ступеньки но торцу с перепадом 1,45 мм, т. е. при повороте кулака на минимальный угол 12 шток гидроцилиндра 30, упирающийся в площадку кулака, получает возможность перемещения на 1,45 мм. Далее через реечную пару, конические колеса 19-20 — на винт t2.
Рис. 2 Кинематическая схема станка мод. 5702
Реверсирование вращения шевера и подачи стола осуществляется электродвигателями, получающими команду от конечного выключателя 2ВК, контакты которого перебрасываются упорами в конце хода стола. Конечный выключатель ЗВК является аварийным и отключает станок, если не срабатывает выключатель 2ВК.
Шевингование бочкообразной формы зуба осуществляется за счет поворота копира 31 на определенный угол. При поступательном движении палец 32, скользящий в пазу копира, через кронштейн, повернутый к столу, сообщает ему качение в вертикальной плоскости вокруг центральной оси. Изделие, установленное в центрах бабок на столе, также качается; при этом ось изделия наклоняется по отношению к оси шевера. Поэтому у торцов шевер снимает больший слой металла, чем в средней части зуба; этим обеспечивается бочкообразная форма зуба шевингуемого колеса. Для расчета частоты вращения шевера необходимо выбрать скорость резания, за которую принимают скорость υск бокового скольжения зубьев шевера относительного зубьев шевингуемого колеса.
Если основа оригинала (карты пли плана) прозрачна, то копию можно снять при помощи стола со…
Определение координат точки. Пусть точка А (рис. 32) находится в квадрате, абсциссы и ординаты вершин…
Рельефом местности называется совокупность неровностей физической поверхности земли. В зависимости от характера рельефа местность делят…
Для обозначения на планах и картах различных предметов местности, применяются специально разработанные условные знаки. Для обличения…
В инженерной геодезии чаще всего пользуются топографическими картами. Их составляют в масштабах 1:10000, 1:25000, 1:50000…
{kind=link}
{kind=link}