В статье рассмотрены релейно-контакторные схемы автоматизации пуска, реверса и торможения асинхронных двигателей с фазным ротором и двигателей постоянного тока.
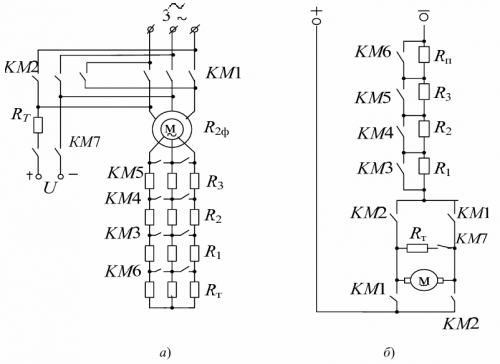
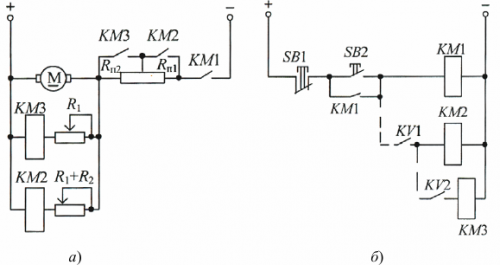
Рассмотрим схемы включения пусковых сопротивлений и контактов контакторов КM3, КM4, КM5, управляющих ими, при пуске асинхронного двигателя с фазным ротором (АД с ф. р.) и двигателя постоянного тока с независимым возбуждением ДПТ НВ (рис. 1). В этих схемах предусмотрены динамическое торможение (рис. 1, а) и торможение противовключением (рис. 1, б).
При реостатном пуске ДПТ НВ или АД с фазным ротором поочередное замыкание (закорачивание) ступеней пускового реостата R1, R2, R3 производится автоматически при помощи контактов контакторов КМ3, КМ4, КМ5, управление которыми может быть осуществлено тремя способами:
путем отсчета промежутков времени dt1, dt2, dt3 (рис.2), для чего используются реле времени (управление по принципу времени);
посредством контроля величины скорости электродвигателя или ЭДС (управление по принципу скорости). В качестве датчиков ЭДС используются реле напряжения или непосредственно контакторы, включенные через реостаты;
применением датчиков тока (токовые реле, настраиваемые на ток возврата, равный Imin), дающим командный импульс при снижении тока якоря (ротора) в процессе пуска до значения Imin (управление по принципу тока).
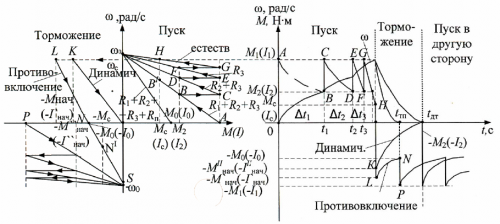
Рассмотрим механические характеристики двигателя постоянного тока (ДПТ) (рис. 1) (для асинхронного двигателя (АД) аналогично, если использовать рабочий участок механической характеристики) при пуске и торможении, а также кривые скорости, момента (тока) в зависимости от времени.
Рис. 1. Схемы включения пусковых сопротивлений асинхронного двигателя с фазным ротором (а) и двигателя постоянного тока с независимым возбуждением (б)
Рис. 2. Пусковые и тормозные характеристики (а) и зависимости ДПТ (б)
Пуск электродвигателя (замыкаются контакты КМ1 (рис. 1)).
При подаче напряжения ток (момент) в электродвигателе равен I1 (M1) (точка А) и двигатель разгоняется с пусковым сопротивлением (R1 + R2 + R3).
По мере разгона ток уменьшается и при токе I2 (точка В) происходит закорачивание R1, ток возрастает до значения I1 (точка С) и т. п.
В точке F при токе I2 происходит закорачивание последней ступени пускового реостата и электродвигатель выходит на естественную характеристику (точка G). Разгон происходит до (точки Н), которой соответствует ток Iс (зависит от нагрузки). Если в точке В не закоротить R1, то электродвигатель разгонится до точки В‘ и будет иметь установившуюся скорость.
Динамическое торможение (размыкаются КМ1, замыкаются КМ7), при этом электродвигатель переходит в точку К, которой соответствует момент (ток) и его величина зависит от сопротивления Rтд.
Торможение противовключением (размыкаются КМ1, замыкаются КМ2), при этом электродвигатель переходит в точку L и начинает очень быстро тормозиться с сопротивлением (R1 + R2 + R3 + Rтп).
Наклон этой характеристики, а значит и величина, одинаков (параллелен) пусковой характеристике с сопротивлением (R1 + R2 + R3 + Rтп).
В точке N необходимо закоротить Rтп, электродвигатель переходит в точку Р и происходит разгон в противоположную сторону. Если в точке N не закоротить Rтп, то электродвигатель разгонится до точки N’ и будет работать на этой скорости.
Схемы автоматического управления пуском ДПТ
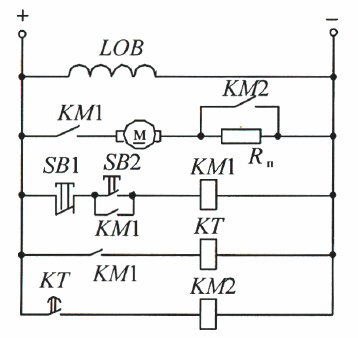
Управление в функции времени (рис. 3) Наиболее часто в качестве реле времени в схемах ЭП применяются электромагнитные реле времени. Они настраиваются на отсчет заданных выдержек времени dt1, dt2, … . Каждое реле времени должно включать соответствующий силовой контактор.
Рис. 3. Схема автоматического пуска ДПТ в функции времени
Управление в функции скорости (чаще всего используется для динамического торможения и торможения противовключением) Данный принцип автоматизации управления предполагает использование реле, которые прямо или косвенно контролируют скорость электродвигателя: для ДПТ осуществляется измерение ЭДС якоря, для асинхронных и синхронных электродвигателей – измерение ЭДС или частоты тока.
Использование устройств, непосредственно измеряющих скорость (реле контроля скорости (РКС) сложного устройства), усложняет установку и схему управления. РКС чаще используют для контроля торможения, чтобы отключить электродвигатель от сети при скорости близкой к нулю. Чаще используются косвенные методы.
При постоянном магнитном потоке ЭДС якоря ДПТ прямо пропорциональна скорости. Поэтому катушку реле напряжения можно включать непосредственно на зажимы якоря. Однако напряжение на зажимах якоря Uя отличается от Eя на величину падения напряжения на обмотке якоря.
При этом возможны два варианта:
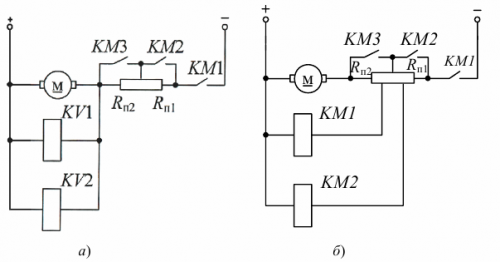
Рис. 4. Силовые схемы подключения ДПТ при использовании в качестве РКС реле напряжений (а) и контакторов (б)
Рис. 5. Силовая схема (а) и схема управления (б) ДПТ при автоматизации пуска в функции скорости. Штриховыми линиями показана схема, когда для измерения напряжения используются реле напряжения КV1, КV2.
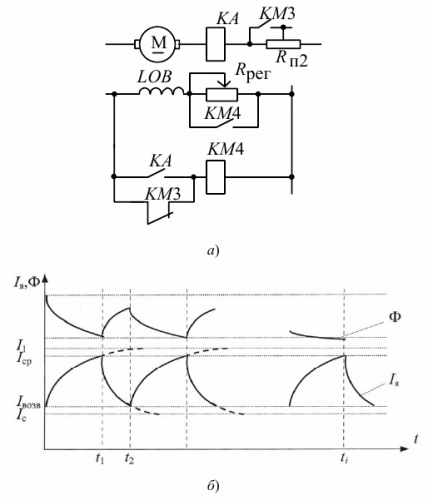
Управление в функции тока. Этот принцип управления реализуется с помощью реле минимального тока, которые включают силовые контакторы при достижении током значение I1 (рис. 6, б). Применяется чаще всего для пуска до повышенной скорости при ослаблении магнитного потока.
Рис. 6. Схема включения (а) и зависимость Ф, Iя = f(t) (б) при пуске ДПТ в функции тока
При броске тока (Rп2 закорочено) реле КА срабатывает и питание на катушку КМ4 подается через контакт КА. Когда ток якоря уменьшается до тока возврата, контактор КМ4 отключается и начинается уменьшение магнитного потока (в цепь обмотки возбуждения LОВ вводится Rрег). При этом ток якоря начинает возрастать (темп изменения тока якоря выше темпа изменения магнитного потока).
При достижении Iя = Iср в точке t1 реле КА и КМ4 срабатывают и Rрег зашунтируется. Начнется процесс нарастания потока и уменьшения Iя до момента t2, когда произойдет отключение КА и КМ4. При всех этих коммутациях М > Мс и электродвигатель будет разгоняться. Процесс пуска заканчивается, когда величина магнитного потока приближается к заданному значению, определяемому введением в цепь обмотки возбуждения сопротивления Rрег и когда при очередном отключении КА, КМ4 ток якоря не достигает Iср (точка ti). Такой принцип управления называют вибрационным.
Автоматизация управления торможением ДПТ
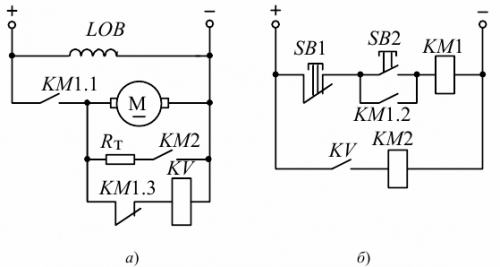
В данном случае применяются те же принципы, что и при автоматизации пуска. Задачей этих схем является отключение электродвигателя от сети при скорости равной или близкой к нулю. Наиболее просто она решается при динамическом торможении с помощью принципов времени или скорости (рис. 7).
Рис. 7. Силовая схема (а) и схема управления (б) динамическим торможением
При пуске нажимаем SB2 и напряжение подается на катушку КМ1, при этом: шунтируется кнопка SB2 (КМ1.2), подается напряжение на якорь электродвигателя (КМ1.1), размыкается цепь питания КV (КМ1.3).
При торможении нажимаем SB1, при этом якорь отключается от сети, замыкается КМ1.3 и срабатывает реле КV (т. к. в момент отключения Ея примерно равно Uс и уменьшается по мере уменьшения скорости). Напряжение подается на катушку КМ2 и к якорю электродвигателя подключается Rт. При угловой скорости, близкой к нулю, якорь реле КV отпадает, обесточивается КМ2 и отключается Rт. Реле КV в данной схеме должно иметь возможно меньший коэффициент возврата, т. к. только в этом случае можно получить торможение до минимальной скорости.
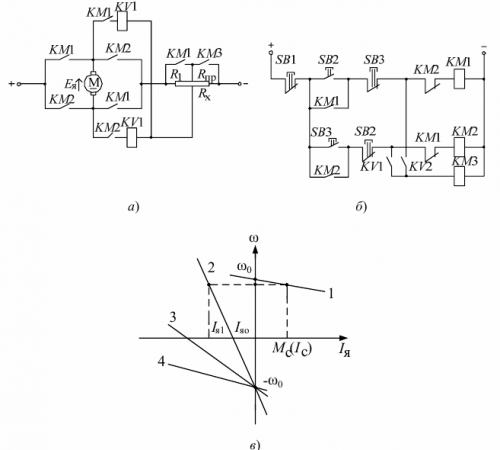
При реверсе электродвигателя используется торможение противовключением и задача схемы управления заключается во введении дополнительной ступени сопротивления при подаче команды на реверс и шунтирование ее, когда скорость электродвигателя близка к нулю. Чаще всего для этих целей используется управление в функции скорости (рис. 8).
Рис. 8. Силовая схема (а), схема управления (б) и тормозные характеристики (в) торможения противовключением ДПТ
Рассмотрим схему без узла автоматизации пуска. Пусть электродвигатель работает «вперед» на естественной характеристике (включение КМ1, разгон не рассматривается).
При нажатии кнопки SB3 отключается КМ1 и включается КМ2. Изменяется полярность приложенного к якорю напряжения. Контакты КМ1 и КМ3 разомкнуты, в цепь якоря вводится полное сопротивление. Происходит бросок тока и электродвигатель переходит на характеристику 2, по которой и осуществляется торможение. При скорости близкой к нулю должны включиться реле КV1 и контактор КМ3. Ступень Rпр зашунтируется и начинается разгон в противоположную сторону по характеристике 3.
Особенности схем управления асинхронных двигателей (АД)
1. Для управления торможением (особенно противовключением) часто применяются индукционные реле контроля скорости (РКС).
2. Для АД с фазным ротором используются реле напряжения KV, cрабатывающие от различных значений ЭДС ротора (рис. 9). Эти реле включаются через выпрямитель, чтобы исключить влияние частоты тока ротора на величину индуктивного сопротивления катушек самого реле (с изменением XL изменяется и Iср, Uср), уменьшить коэффициент возврата и увеличить надежность работы.
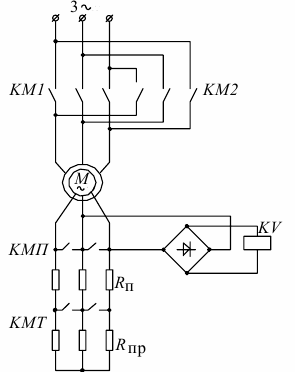
Рис. 9. Схема торможения противовключением АД
Принцип действия: при большой угловой скорости ротора электродвигателя наведенная в его обмотках ЭДС небольшая, т. к. E2s = E2k · s, а скольжение s незначительно (3–10 %). Напряжение на реле KV недостаточно для втягивания его якоря. При реверсе (КМ1 размыкается, а замыкается КМ2) направление вращения магнитного поля в статоре изменяется на противоположное. Реле KV срабатывает, размыкает цепь питания контакторов КМП и КМТ и в цепь ротора вводится пусковое Rп и тормозное Rпр сопротивления. При скорости близкой к нулю реле KV отключается, замыкается КМТ и электродвигатель разгоняется в противоположную сторону.
Если основа оригинала (карты пли плана) прозрачна, то копию можно снять при помощи стола со…
Определение координат точки. Пусть точка А (рис. 32) находится в квадрате, абсциссы и ординаты вершин…
Рельефом местности называется совокупность неровностей физической поверхности земли. В зависимости от характера рельефа местность делят…
Для обозначения на планах и картах различных предметов местности, применяются специально разработанные условные знаки. Для обличения…
В инженерной геодезии чаще всего пользуются топографическими картами. Их составляют в масштабах 1:10000, 1:25000, 1:50000…
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}